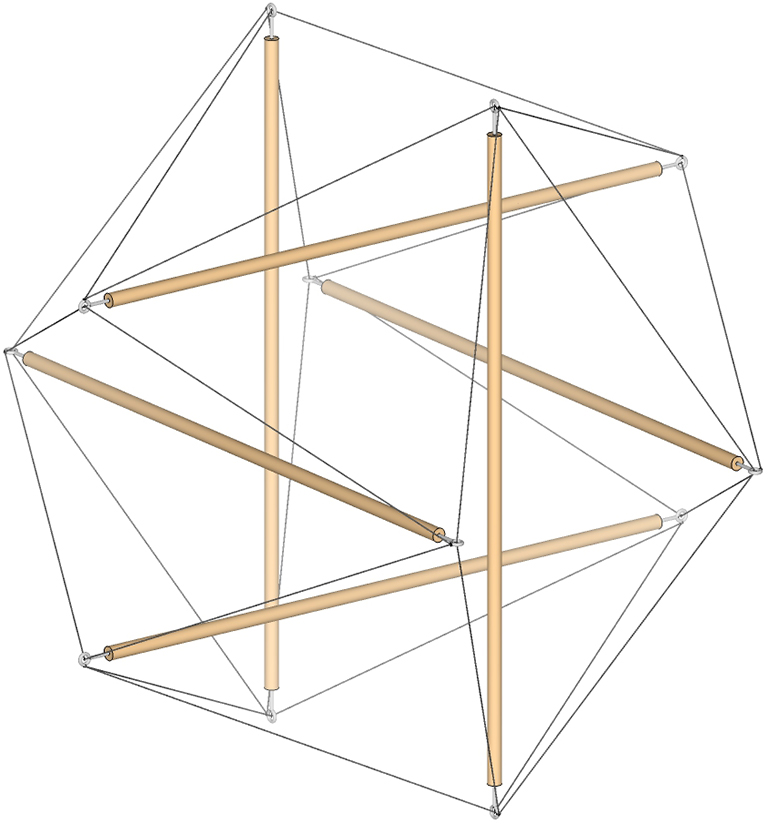
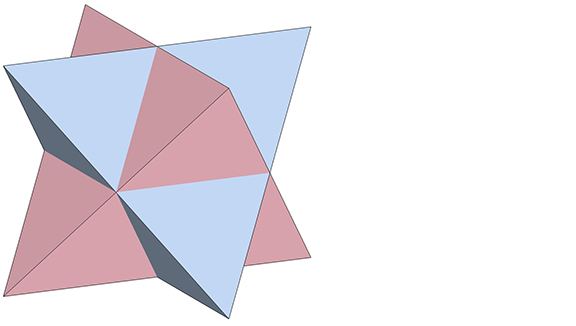
The 6-strut tensegrity sphere is the spherical, or tensor equilibrium phase of the tensegrity tetrahedron and its dual, which is the same tensegrity tetrahedron but with a 90° rotation and with vertices oriented counter-clockwise to the other.
The dual of the regular tetrahedron is conventionally described as the same tetrahedron. Its dual is here described as the negative of the other.
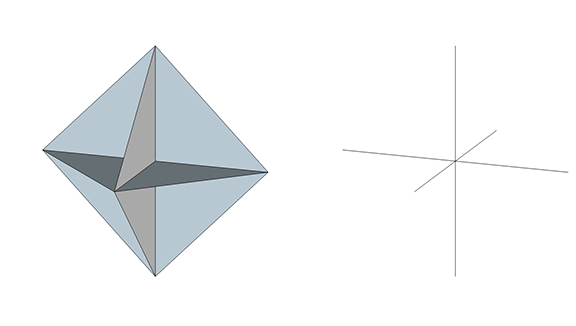
Rectification of either (or the intersection of both) produces the regular octahedron.
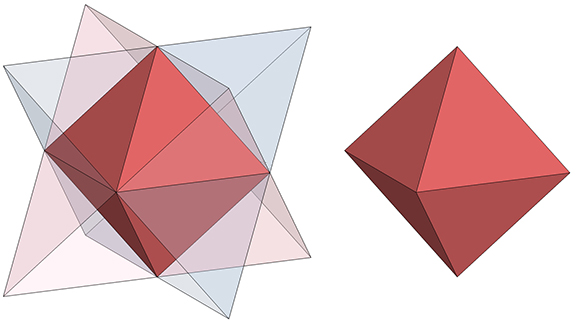
The 12 edges of the octahedron describe three intersecting squares. Connecting alternate vertices of these squares describes three intersecting lines aligned with the distribution of the struts in the 6-strut tensegrity sphere. For consistency, the three lines are here described as three 2-sided polygons, all sharing a common center and each intersecting the other at 90°.
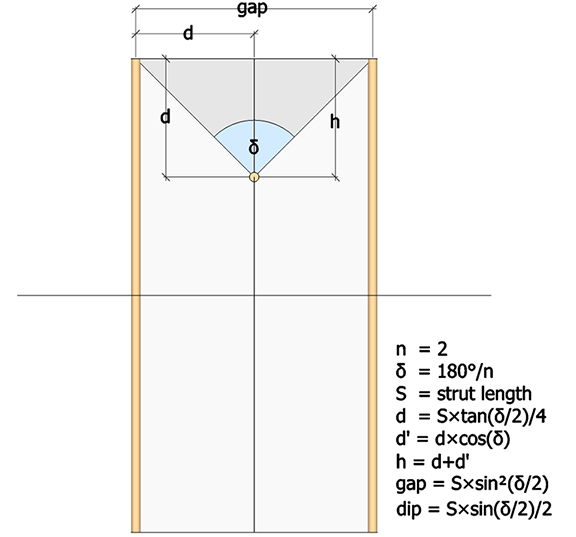
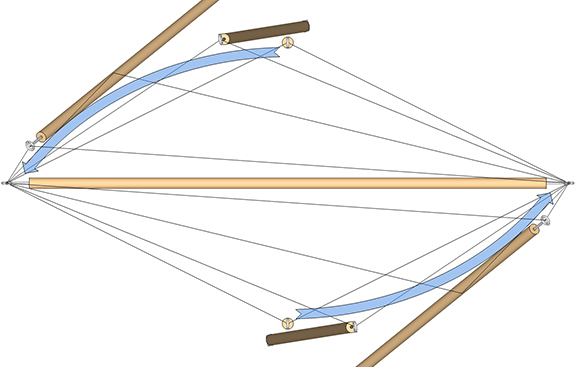
Each of the three intersecting lines (or 2-sided polygons) of the 6-strut tensegrity sphere consists of two struts and the triangular cross section of the valley formed by the tendons connecting each strut-pair to its dangler. The dimensions of this triangular cross-section are illustrated below.
- n (number of sides of the polygon) = 2
- δ (interior angle of the polygon) = 90°
- S = strut length
- d (vertical distance from polygon’s edge to strut) = S×tan(δ/2)/4
- d’ (height of the triangle formed by the strut ends and the polygon’s vertex) = d×cos(δ) = 0
- h (height of the triangle formed by the strut ends and the midpoint of their dangler strut) = (d+d’) = (d+0) = d.
- gap (distance between strut ends) = S×sin²(δ/2)/2
- dip (distance from strut end to midpoint of dangler strut) = S×sin(δ/2)/2
In its spherical, or equilibrium phase, the dimensions of the cross section of the tension valley created by the tendons reach their maximum. In the polyhedral phases described below, δ approaches to 0°, and both the gap and dip go to zero (0).
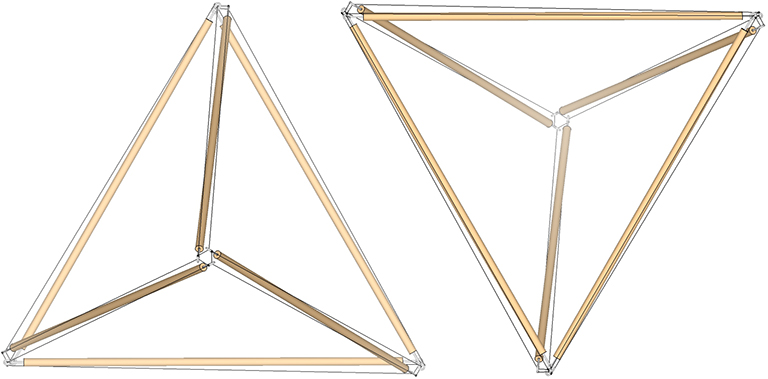
Transformation of the 6-Strut Tensegrity Sphere into Positive (or Clockwise) and Negative (or Counter-Clockwise) Tetrahedron.
From the spherical phase, the 6-strut tensegrity sphere is reduced to the tensegrity tetrahedron by sliding the strut ends along the tendon toward opposing ends of their dangler, as illustrated below.
Moving the struts in one direction results in the positive tensegrity tetrahedron…
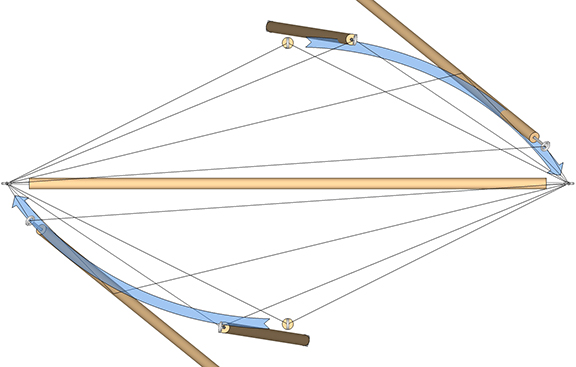
…and moving the struts in the opposite direction results in the negative tensegrity tetrahedron.
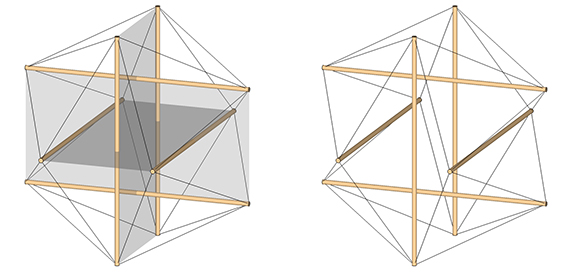
The surface of the 6-strut tensegrity sphere describes eight triangular tendon-loops. In the transition to the tetrahedron, four transform into the tetrahedron’s four faces, and the other four transform into the tetrahedrons four vertices. Their roles are swapped in the transformation to the negative tetrahedron.
The oscillation from the tensor equilibrium (spherical) phase, to the extremes of the two tetrahedron phases, may be stopped at any point and the model will hold its shape. As long as the elasticity and tautness of the tendons is maintained, the models do not show a preference for one state over another.