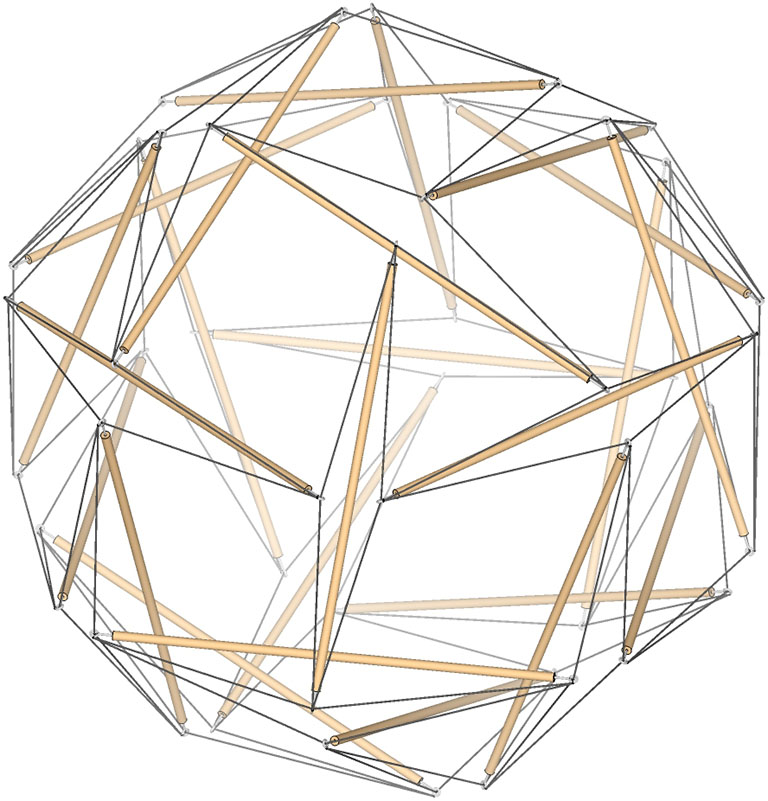
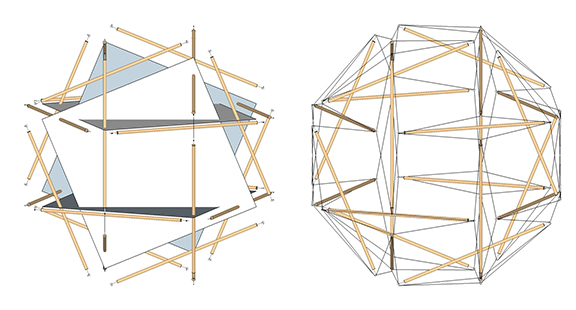
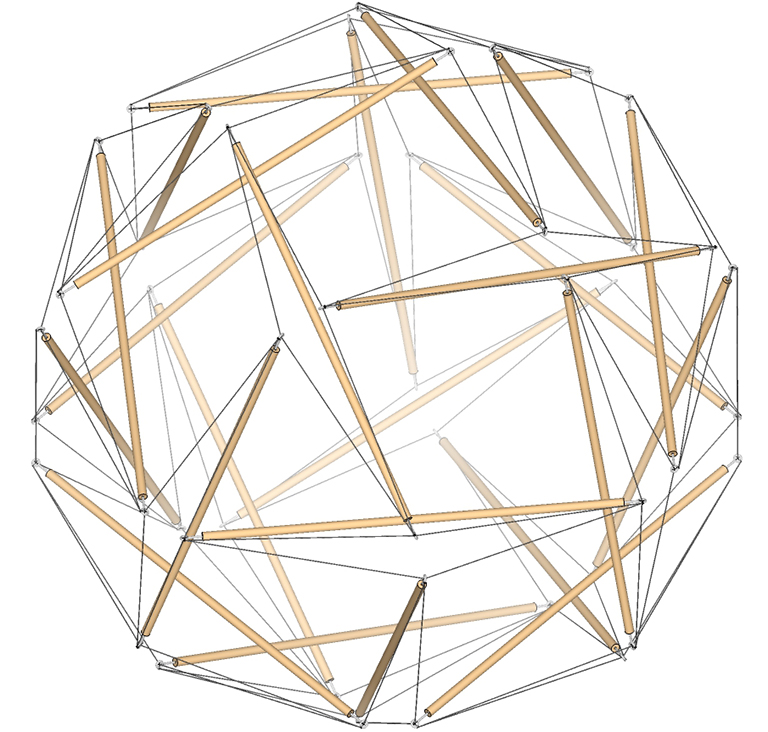
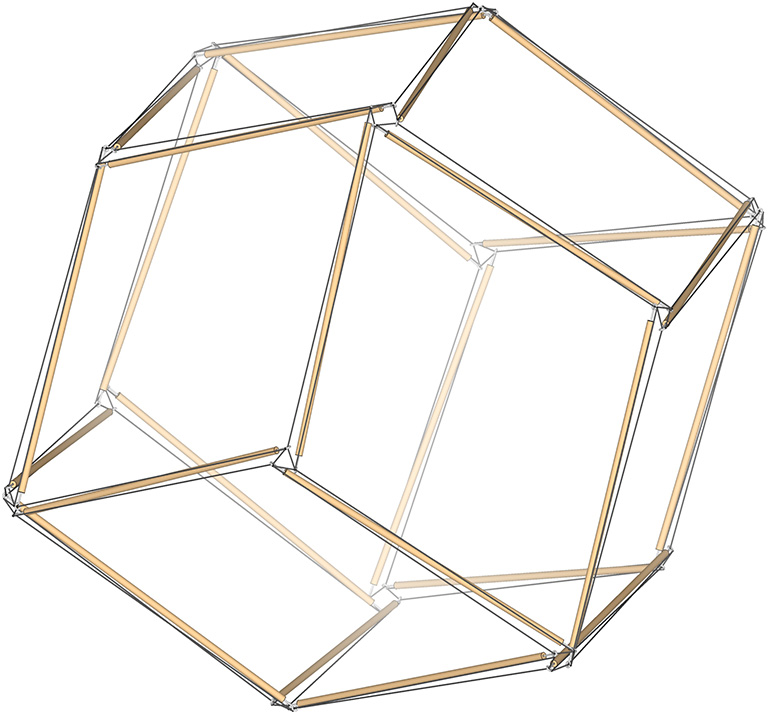
The 24-strut tensegrity sphere is the spherical, or tensor equilibrium phase of the tensegrity rhombic dodecahedron and its dual, the tensegrity vector equilibrium (VE). It also reduces to the double-edge tensegrity octahedron and its dual, the double-edge tensegrity cube.
The rhombic dodecahedron is the dual of the vector equilibrium (VE).
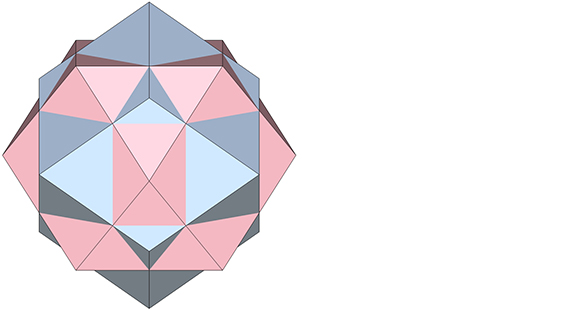
Rectification of either (i.e., the intersection of both) produces a non-uniform rhombicuboctahedron.
The 48 edges of a rhombicuboctahedron consist of six intersecting octagons. If we make the six octagons uniform and connect alternate vertices, we produce six squares whose edges align with the distribution of the struts in the 24-strut tensegrity sphere.
Each of the six intersecting squares of the 24-strut tensegrity sphere consists of four struts and the triangular cross section of the valley formed by the tendons connecting each strut-pair to its dangler. The dimensions of this triangular cross-section are illustrated below.
- n (number of sides of the polygon) = 4
- δ (interior angle of the polygon) = 45°
- S = strut length
- d (vertical distance from polygon’s edge to strut) = S×tan(δ/2)/4
- d’ (height of the triangle formed by the strut ends and the polygon’s vertex) = d×cos(δ)
- h (height of the triangle formed by the strut ends and the midpoint of their dangler strut) = d+d’
- gap (distance between strut ends) = S×sin²(δ/2)/2
- dip (distance from strut end to midpoint of dangler strut) = S×sin(δ/2)/2
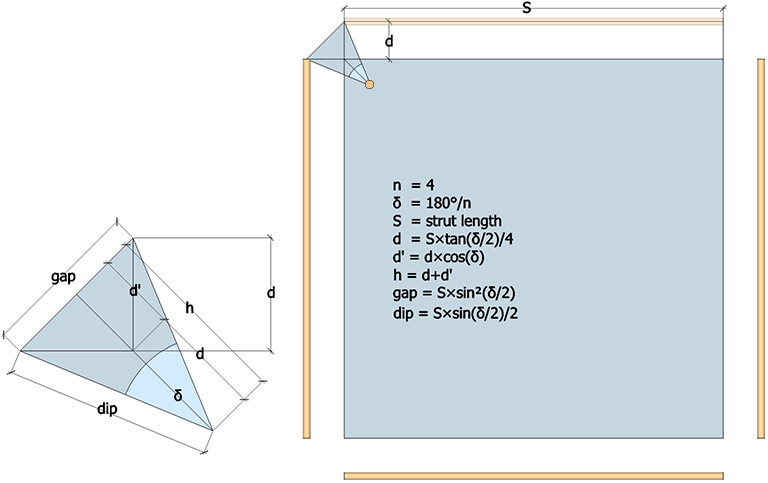
In its spherical, or equilibrium phase, the dimensions of the cross section of the tension valley created by the tendons reach their maximum. In the polyhedral phases described below, δ approaches to 0°, and both the gap and dip go to zero (0).
Transformation of the 24-Strut Tensegrity Sphere to the Tensegrity Vector Equilibrium (VE)
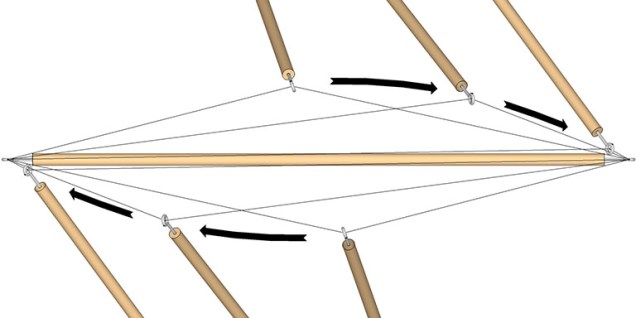
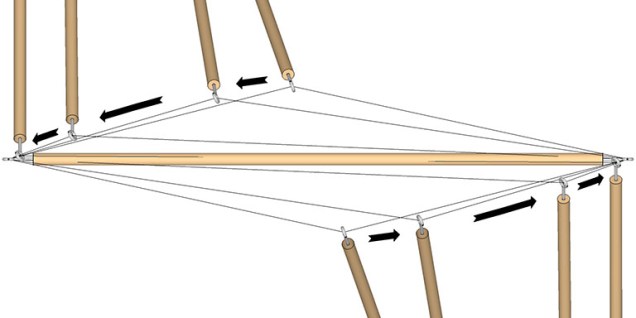
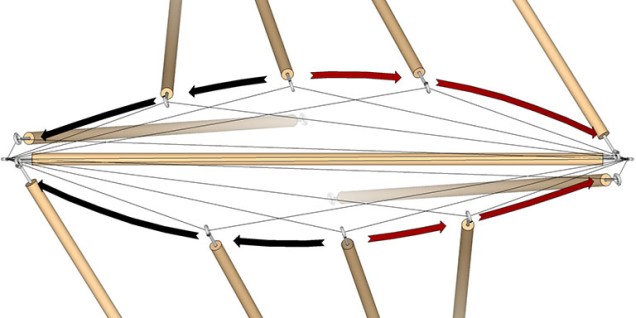
From the spherical phase, the 24-strut tensegrity sphere is reduced to the tensegrity VE by moving each strut along the long tendon toward the end of its dangler, as illustrated below.
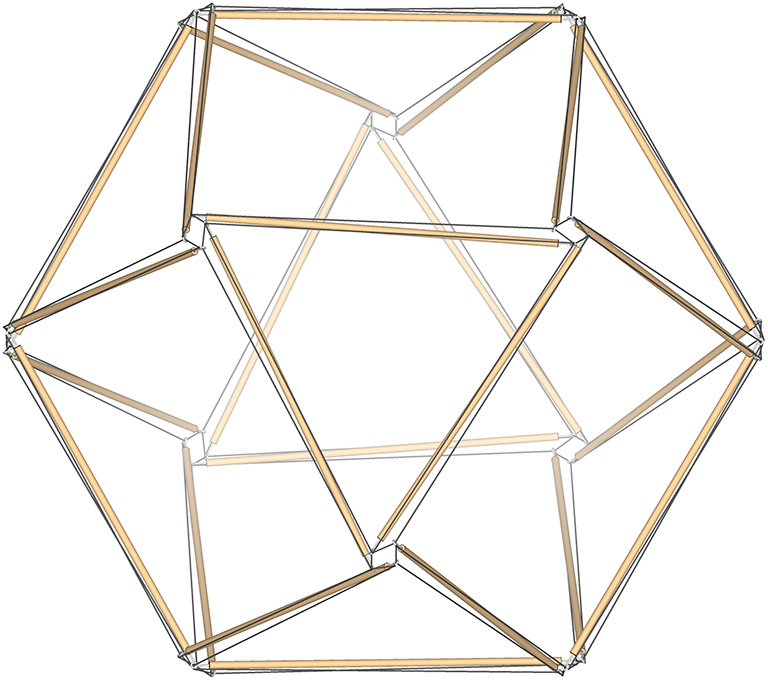
The surface of the 24-strut tensegrity sphere describes eight triangular tendon-loops, six square tendon-loops, and twelve rhombic loops. A face-on view of one of the triangular tendon loops is illustrated below.
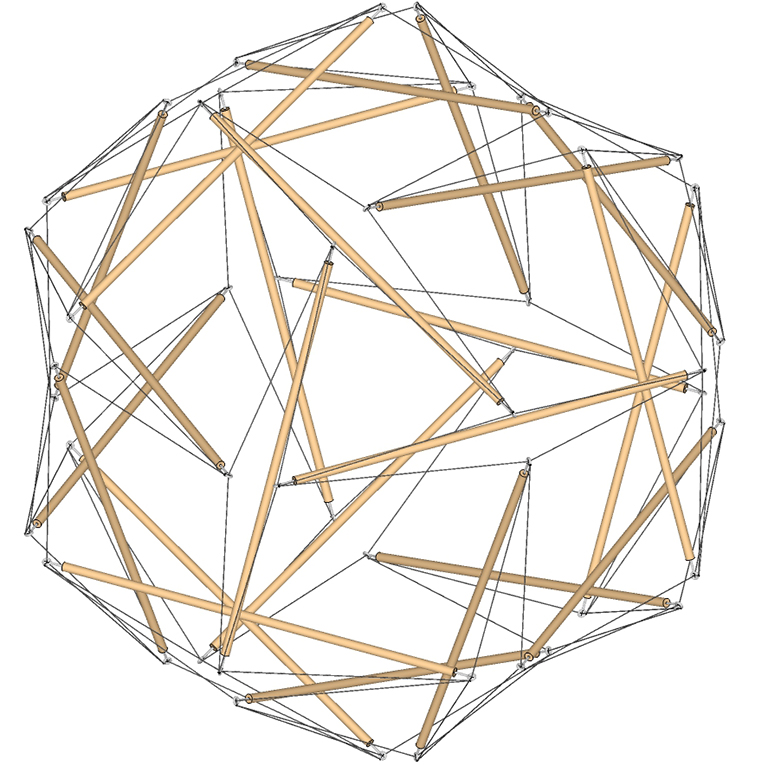
In the transition to the VE, the eight triangular tendon loops transform into the VE’s eight triangular faces, the six square tendon loops transform into the VE’s six square faces, and the twelve rhombic loops transform into the VE’s twelve vertices.
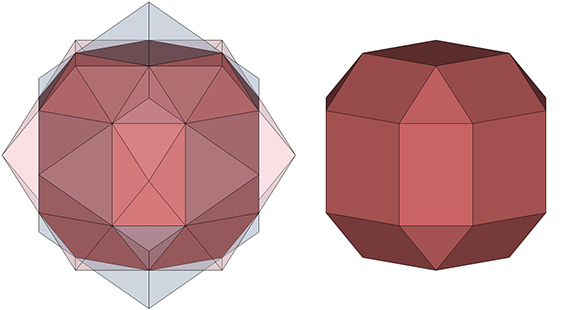
Transformation of the 24-Strut Tensegrity Sphere to the Tensegrity Rhombic Dodecahedron
From the spherical phase, the 24-strut tensegrity sphere is reduced to the tensegrity rhombic dodecahedron by moving each strut along the short tendon toward the end of its dangler, as illustrated below.
The surface of the 24-strut tensegrity sphere describes eight triangular tendon-loops, six square tendon-loops, and twelve rhombic loops. One of the twelve rhombic tendon loops is right-center in the illustration below.
In the transition to the rhombic dodecahedron, the twelve rhombic tendon loops transform into the rhombic dodecahedron’s twelve rhombic faces, the six square tendon loops transform into its six 4-strut vertices, and the eight triangular loops transform into its eight 3-strut vertices.
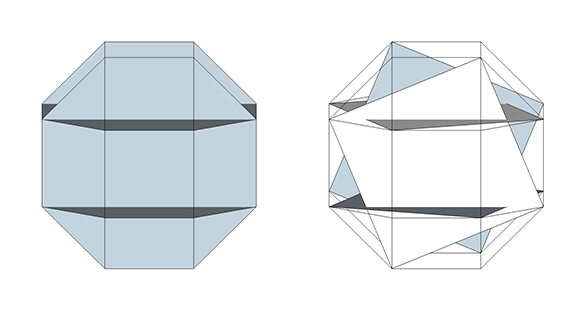
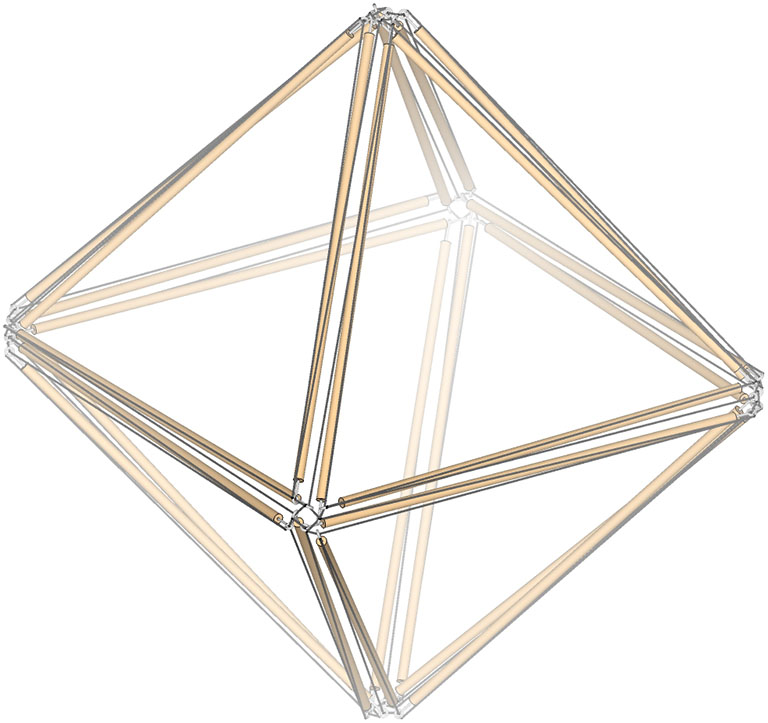
Transformation of the 24-Strut Tensegrity Sphere to the Double-Edged Tensegrity Octahedron
From its spherical phase, the 24-strut tensegrity can be transformed into a double-edge octahedron or a double-edge VE by moving the strut pairs together to either the left or right end of their danglers. That is, one strut moves along the short tendon, while the other moves along the long tendon toward the same end of their dangler.
The surface of the 24-strut tensegrity sphere describes eight triangular tendon-loops, six square tendon-loops, and twelve rhombic tendon-loops. In the illustration below, the six square loops have contracted to the vertices of the double-edge octahedron, while the eight triangular tendon loops have expanded into its eight faces, and the twelve rhombic tendon loops have transformed into its twelve edges.
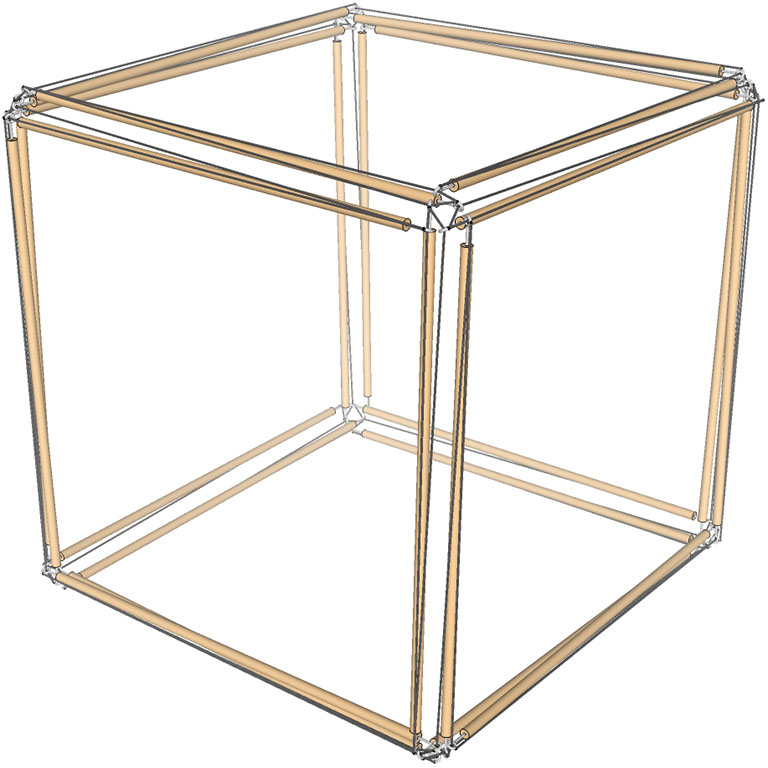
Transformation of the 24-Strut Tensegrity Sphere to the Double-Edged Tensegrity Cube
The surface of the 24-strut tensegrity sphere describes eight triangular tendon-loops, six square tendon-loops, and twelve rhombic tendon-loops. In the illustration below, the eight triangular loops have contracted to the vertices of the double-edge cube, while the six square tendon loops have expanded into its eight faces, and the twelve rhombic tendon loops have transformed into its twelve edges.

I am really amazed by the controlated rise of complexity of the structures obtained from adding more struts and changing the behavior of the structure while defining the moving along the tendons in oscillating mode. My background is on electrical engineering, and I marvell to these complex mechanical structures obtained by using such a simple elements. I perceive these models could also apply in the understanding or defining the way the semiconductor materials are behave under electromagnetic fields, or the way of defining microwave wave guides and devices. Also, in solving the problems of high interconnected communication networks, these models could be very useful. For the time being the basic models in this part of engineering are very simple and obsolete. Tensegrity holds the key for a fresh and optimal approach in all the domains. Congratulations for your pioneering work!
I agree. Though my interests in the geometry are more philosophical than practical, I probably wouldn’t be pursuing it so enthusiastically if I didn’t believe in its potential to broaden our understanding of the natural world. Thanks for your comments!