“The rhombic dodecahedron’s 144 modules may be reoriented within it to be either radiantly disposed from the contained sphere’s center of volume or circumferentially arrayed to serve as the interconnective pattern of six 1/6th spheres, with six of the dodecahedron’s 14 vertexes congruent with the centers of the six individual 1/6th spheres that it interconnects. The six 1/6th spheres are completed when 12 additional rhombic dodecahedra are close-packed around it. The fact that the rhombic dodecahedron can have its 144 modules oriented as either introvert-extrovert or as three-way circumferential provides its valvability between broadcasting-transceiving and noninterference relaying. The first radio tuning crystal must have been a rhombic dodecahedron.” — R. Buckminster Fuller, Synergetics, 426.41-42
The isotropic vector matrix modeled as A and B quanta modules discloses two rhombic dodecahedra, one occupying the positions of the spheres, and the other the space between the spheres. The two constructions can be shown to exchange places during the jitterbug transformation, which to me is strong validation of the models. See also: Spheres and Spaces.
The close-packing of spheres around a central nucleus form successive shells of cuboctahedra, and defines the polyhedron that Fuller called the vector equilibrium (VE ). We can construct the VE in A and B quanta modules by joining around a common center the quanta module constructions of eight regular tetrahedra and six half-octahedra.
Quanta module constructions of eight tetrahedra and six half-octahedra combined around a common center for the quanta module construction of the VE.
At the center of this construction we have inadvertently constructed a rhombic dodecahedron, which elegantly corresponds to the nuclear sphere of the close-packed array.
At the center of the quanta module construction of the VE is a rhombic dodecahedron.
In the quanta module construction of the isotropic vector matrix, it can be shown operationally that the same rhombic dodecahedron occurs at each of the vector equilibrium’s twelve exterior vertices, coinciding with the twelve spheres in the first shell of spheres radially close-packed around a central nucleus.
In the quanta module models of the isotropic vector matrix, twelve rhombic dodecahedra close pack around the rhombic dodecahedron at the center of the VE, just as spheres close pack around a nucleus.
Curiously, another rhombic dodecahedron occurs between vector equilibria in the matrix, that is, in the spaces between the spheres.
An alternate quanta module construction of the rhombic dodecahedron occurs between the rhombic dodecahedra associated with spheres in the isotropic vector matrix. This construction is identified with spaces.
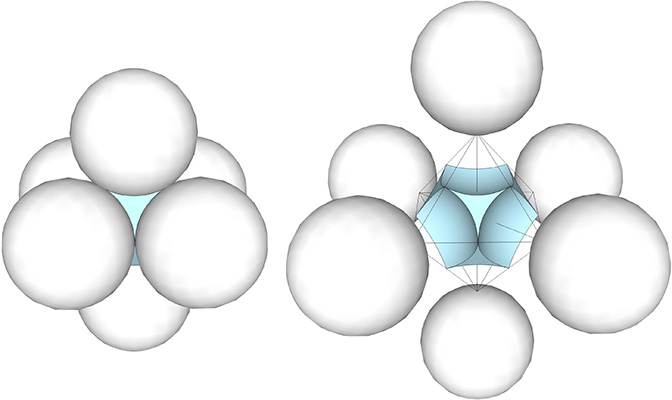
In the interstitial model of the isotropic vector matrix, the space between spheres is disclosed to be a concave vector equilibrium at the centers of the octahedra.
Spaces in the isotropic vector matrix are occupied by the concave vector equilibria at the centers of octahedra.
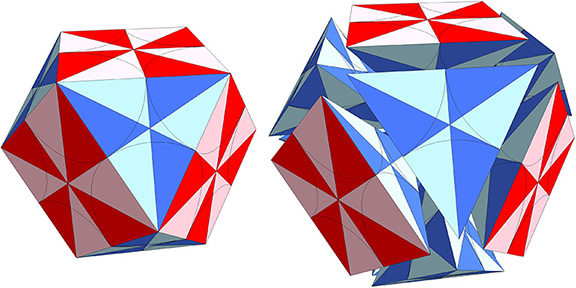
Because spaces in the isotropic vector matrix are occupied by concave vector equilibria, Fuller conceived of spheres as convex vector equilibria (see Spheres and Spaces). During the jitterbug transformation, these two rhombic dodecahedra exchange places, i.e., the spaces become spheres and the spheres become spaces. Fuller imagined the spaces to be spheres turned inside-out; the concave VE discloses the sphere’s interior (concave) surface. This conception of the jitterbug transformation is reinforced in the two quanta module constructions of the rhombic dodecahedron, as the following illustration should make clear.
Each of the two quanta module constructions of the rhombic dodecahedra is the inside out version of the other.
We can turn one quanta module construction of the rhombic dodecahedron into the other by dividing it into six irregular octahedra and then flipping them 180° so that the center becomes the surface (or vice versa). See also: Anatomy of a Sphere; and Spheres and Spaces.
Jitterbugging into and out of its ground state, the isotropic vector matrix seems to reach maximum disequilibrium (i.e. maximum expansion) when the contracting vector equilibria (VEs) and expanding octahedra both describe regular icosahedra. It can be shown, however, that the contracting VEs and expanding octahedra cannot pass through their icosahedral phases simultaneously. While one has expanded or contracted into a regular icosahedron, the other describes an irregular icosahedron that complements the other to maintain an unbroken array of face-bonded polyhedra.
Precisely midway through the jitterbug, both the collapsing VEs and the expanding octahedra describe an irregular icosahedron identical with the six-strut tensegrity sphere which, when combined to fill all-space, forms the tensegrity model of the isotropic vector matrix. See also: Tensegrity. The polyhedron associated with the six-strut tensegrity sphere is now more commonly known as the Jessen orthogonal icosahedron, but in Fuller’s geometry it is more accurately described as the spherical form of the tensegrity tetrahedron. This phase seems to be the true equilibrium phase of the jitterbug, or what I’m now calling the tensegrity, or tensor equilibrium phase—the vector equilibrium phases, i.e., the VE and octahedron phases, being the extremes. See: Tensegrity Equilibrium and Vector Equilibrium.
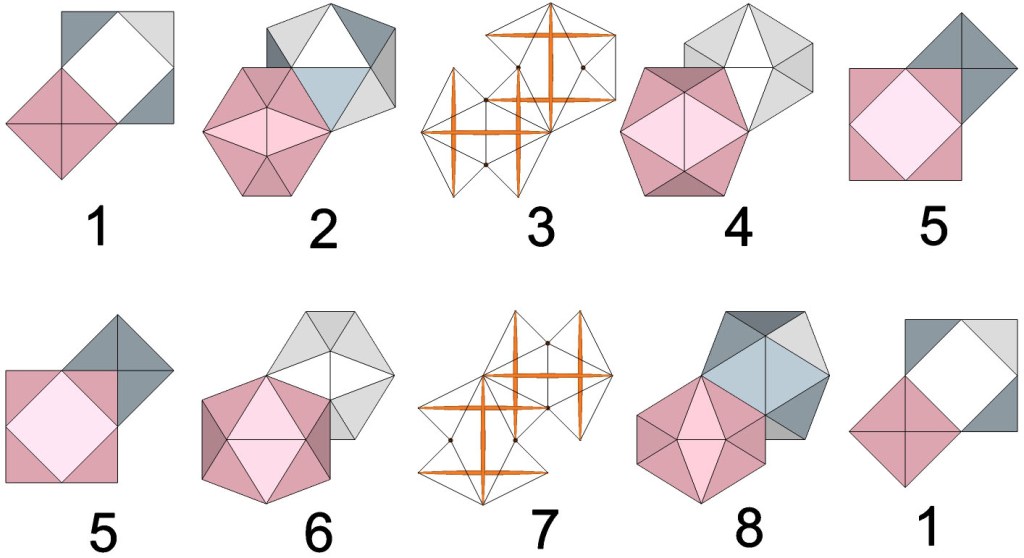
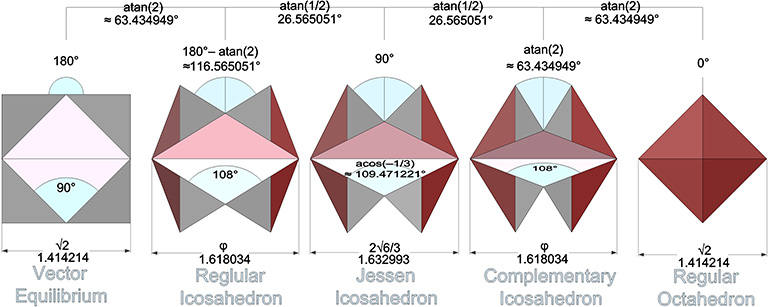
Phases of the Jitterbug Transformation: Phases 1 and 5 are the base states, alternating between VEs and octahedra; at phases 3 and 7 (the midway point) the octahedra and the VEs have both transformed into polyhedra whose dimensions are identical with the six-strut tensegrity sphere; at phases 2, 4, 6, and 8, the regular icosahedra are complemented by irregular icosahedra with rational, even-numbered face angles.
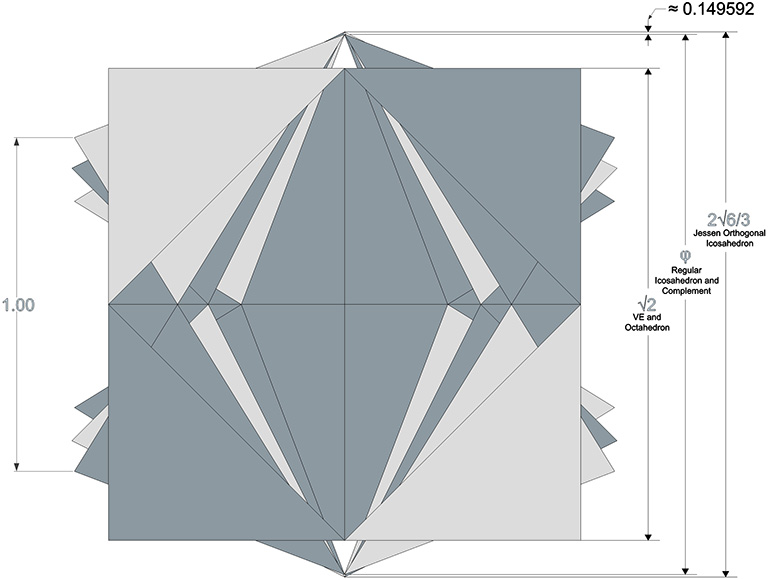
The six-strut tensegrity sphere describes an irregular icosahedron whose cubic domain is less than 1% larger than that of the the regular icosahedron and its complement. With unit edge lengths, the cubic domain of the jitterbugging VE increases from φ (the golden ratio, (√5+1)/2) at the phases of the regular icosahedron and its complement, to 2√6/3, a difference of only about 0.149592.
Linear dimension of cubic domains at each phase of the jitterbug. The VE expands and contracts from √2 at the VE and octahedron phases, through (√5+1)/2 or φ at the regular icosahedron and complement phases, to a maximum of 2√6/3 at the midpoint of the transformation when the jitterbug describes the Jessen orthogonal icosahedron or six-strut tensegrity sphere.
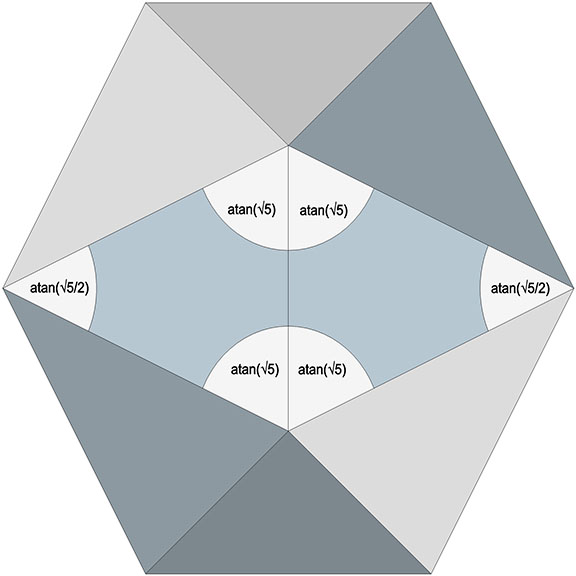
Represented as a convex polyhedron, eight of the twenty faces of the Jessen orthogonal icosahedron remain equilateral triangles (all angles 60°), while the remaining twelve, corresponding to the six open square faces of the VE, are isosceles triangles whose angles are atan(√5/2) and atan(√5), approximately 48.189685°, and 65.905157°.
Jessen icosahedron represented as a convex polyhedron.
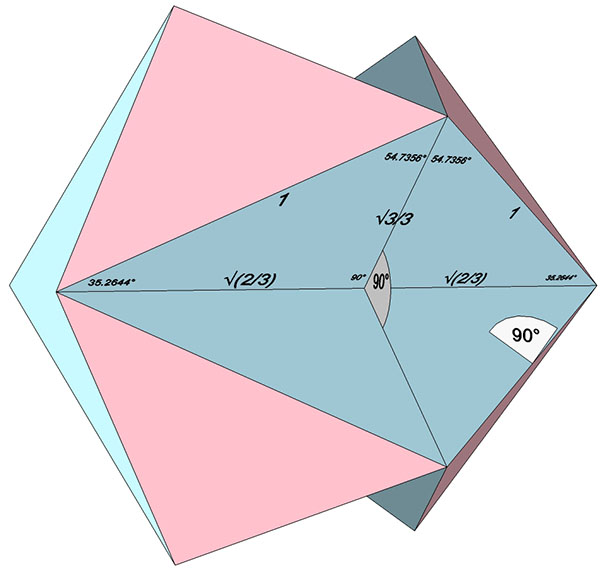
The polyhedron that most closely resembles the six-strut tensegrity sphere draws the vector along the long diagonal (rather than the short diagonal) of the skewed square. This construction forms the concave polyhedron identified as the Jessen Orthogonal Icosahedron, so named because its dihedral (face-to-face) angles are all 90°. Curiously, the angles of the its concave faces, atan(√2/2) and atan(√2) (approx. 35.2644° and 54.7356°) are also found in the tetrahedron and A quanta module, which suggest that that the Jessen may have a rational volume in tetrahedra.
In fact, if the long edge of the Jessen’s concave face is held at √2 (as shown below for the jitterbugging of the 6-strut tensegrity sphere) its tetrahedral volume is precisely 7.5. If the Jessen’s concavities are filled in, its volume is exactly 10.5 unit tetrahedra. The concavities alone have a volume of 3. The same tetrahedral volume as the unit-diagonal cube.
The Jessen orthogonal icosahedron is the polyhedral form of the six-strut tensegrity sphere. All dihedral angles are 90°. The surface angles of its concave faces, arctan(√2) and arctan (√2/2) are found in the regular tetrahedron and the A quanta module.
The jitterbug transformation may be modeled by alternately squeezing the struts of the six-strut tensegrity inward to form the octahedron, and pulling the struts outward to form the VE.
A tensegrity model of the jitterbug transformation. The struts of the six-strut tensegrity sphere are alternately squeezed inward and pulled outward, stretching the tendons into the shapes of the VE and the octahedron.
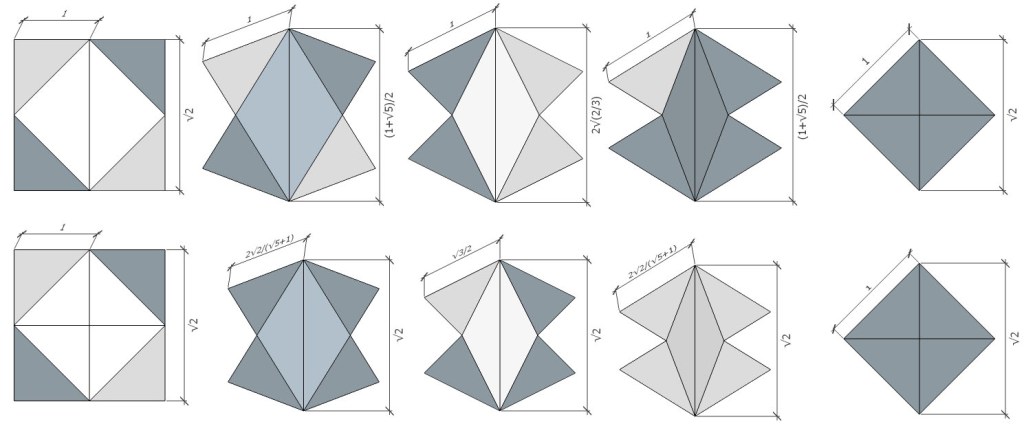
If we allow the tendons of the six-strut tensegrity sphere to stretch while the struts maintain their length of √2 at vector equilibrium, we find that the tendon length increases from √3/2 (approximately 0.866) at tensegrity equilibrium to 1.0 at vector equilibrium. Between tensegrity and vector equilibrium, the icosahedron and its complement have a tendon-edge length of 2√2/(√5+1), or √2/φ, approximately 0.874032.
Top Row: If the tendon length is held constant at 1.0, the strut length decreases from 2√(2/3) (approximately 1.633) at tensegrity equilibrium to √2 (approximately 1.414) at vector equilibrium. Bottom Row: If the strut length is constant, the tendons stretch from √3/2 (approximately 0.866) at tensegrity equilibrium to 1.0 at vector equilibrium.
The concave forms of the regular icosahedron and its complement have, despite their different shapes, identical face angles: eight equilateral triangles (60°, 60°, 60°) and twelve isosceles triangles of 36°, 36°, 54°.
Represented as the concave polyhedra, the regular icosahedron (left) and its complement (right) have, despite appearances, identical surface angles and cubic domains.
The dihedral angles of the concave polyhedra oscillate between 0° and 180°, passing through: arccos(-√5/5) ≈ 116.5605° at the regular icosahedron phase; 90° at the Jessen phase; and arctan(2) ≈ 63.4349° at the complementary icosahedron phase. The reduction or increase of the angles between phases follows the pattern: arctan(2); arctan(1/2); arctan(1/2); arctan(2); arctan(1/2), etc.
The face angles of the concave polyhedra oscillate between 0° and 180°, passing through: 36° and 108° at the regular icosahedron and its complement phases; and arctan(√2/2) ≈ 35.3644° and arccos(-1/3) ≈ 109.4712° at the Jessen phase.
Icosahedron phases of the jitterbug as concave polyhedra.
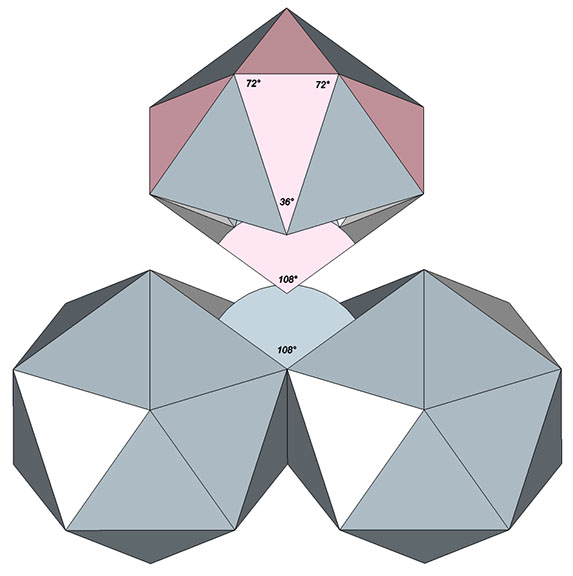
The space-filling complement to the regular icosahedron when represented as a convex polyhedron has rational, whole-number face angles of 36°, 72°, and 72°, the same angles that constitute the golden triangle. Its internal edge-to-edge angles of 108° (3/10 of 360°) match the inter-edge angles of close packed convex regular icosahedra so that one nests transversely between the others.
The space-filling complement to the icosahedron (top, pink) nests between two regular icosahedra.
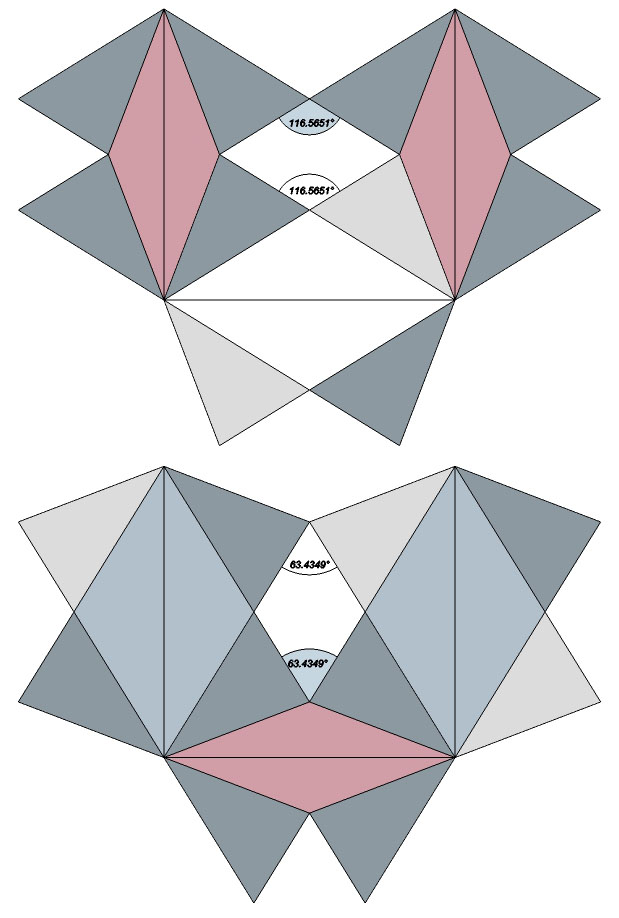
The concave faces of the regular icosahedron and its complement form symmetrical “holes” that tunnel perpendicularly through the matrix with angles of 2×atan(φ) and 2×atan(1/φ) or atan(2), approximately 116.56505° and 63.43495° respectively.
The concave faces of the regular icosahedron and its complement form holes that tunnel transversely through the matrix.
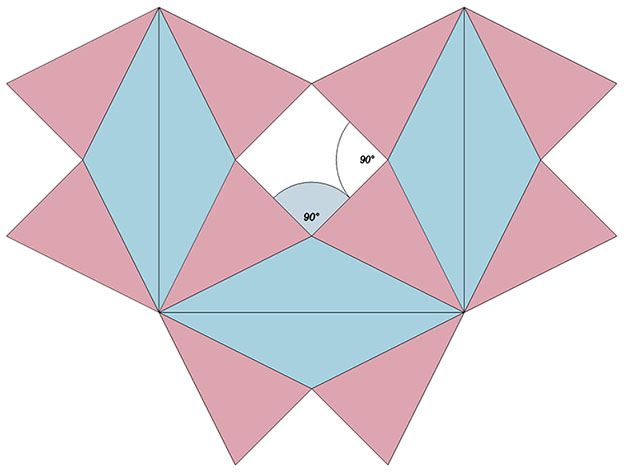
At tensegrity equilibrium the dihedral angles approach 90° and the transverse “holes” are orthogonal.
The concave faces of the Jessen orthogonal icosahedron form square holes that tunnel transversely through the matrix.
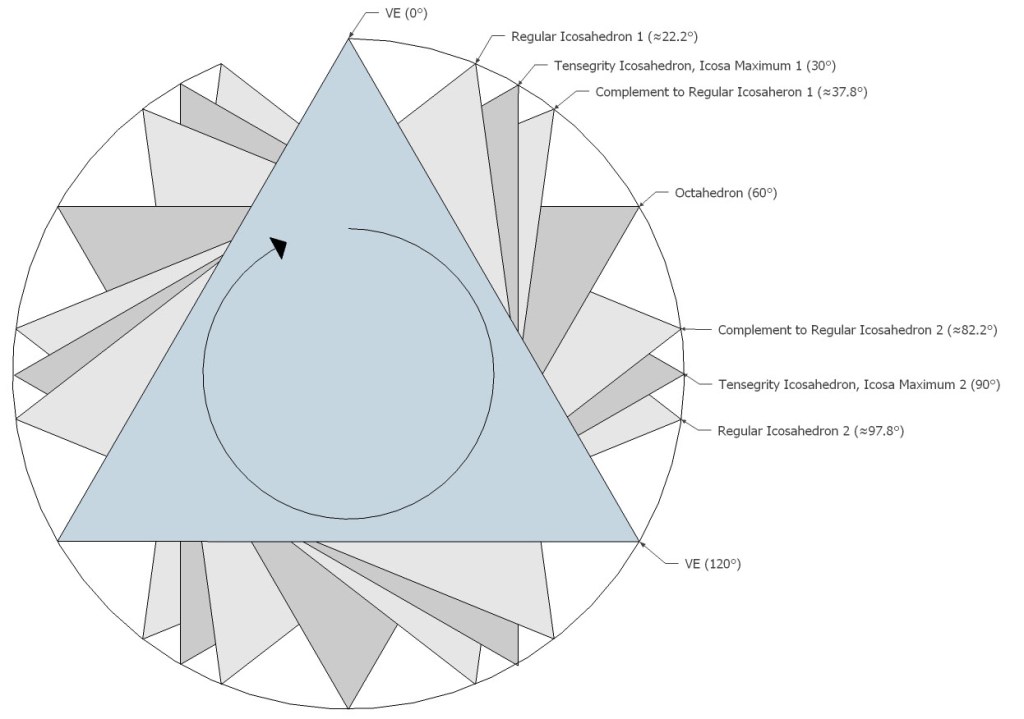
In the following illustration, the sequence of polyhedral transformations is shown in relation to the the angular rotation of the equilateral triangles in the vector model of the jitterbug.
From the vector equilibrium (VE) phase, a rotation of arctan(√(5/3))-30° (approximately 22.23875°) produces the regular icosahedron. Additional rotations of arctan(√(3/5))-30° (approximately 7.76125°) produce the Jessen icosahedron at 30°, and the space-filling complement to the regular icosahedron at arctan(√(3/5)) (approximately 37.76125°). Another rotation of 22.23875° produces the Octahedron at 60°. From the octahedron phase the rotation can reverse direction or continue to produce the complement to the regular icosahedron at arctan(√(5/3))+30° (approximately 82.23875°), the Jessen icosahedron at 90°, the regular icosahedron at arctan(√(3/5))+60° (approximately 97.76125°), and the VE again at 120°.
The regular icosahedron, the Jessen icosahedron, and the space-filling complement to the regular icosahedron, are truncations of the rhombic tricontahedron (top left), pyritohedron (top middle), and pentagonal dodecahedron (top right), respectively.
Another way to visualize the difference between the two equilibrium phases of the jitterbug—tensegrity equilibrium (see Jessen Orthogonal Icosahedron and Tensor Equilibrium, and Tensegrity) and vector equilibrium (see Vector Equilibrium and the “VE”)—is to observe the path followed by the triangles’ vertices. In the case of the tensegrity model of the isotropic vector matrix, and if the tendons are assumed be elastic and the struts to be non-compressible, the path follows the edges of the cube in the which the triangle rotates. In the vector model, the triangle’s vertices follow an arc coincident with the cube’s orthogonal planes and are identical with cube’s vertices at the VE and octahedron phases.
In the model below, tensegrity equilibrium is represented by an elastic cord stretched between three rings attached to the cube’s edges. Given negligible friction between the rings and the edges, the cord will find its natural equilibrium in the position shown, coinciding the the Jessen Orthogonal Icosahedron, i.e., the shape of the unstressed 6-strut tensegrity sphere.
A loop of elastic cord stretched between three edges of a wireframe cube with frictionless rings will find its natural equilibrium in a position identical with the edges of Jessen orthogonal icosahedron and the tendons of the six-strut tensegrity sphere.
Elastic loops stretched between the edges of a cubic scaffold with frictionless rings describe the shape of the six-strut tensegrity sphere and Jessen orthogonal icosahedron.
Equilibrium in the vector model is represented in the illustration below by the pink spheres nestled in the valleys of the arcs followed by the vertices of the triangles’ triangles rotation in the jitterbug transformation—which coincides with the octahedron phase of the jitterbug. The instability of the de-nucleated VE (the removal its nucleus, or radial vectors, is what precipitates the jitterbug) is represented by the blue spheres when they are precariously perched at the peaks of the arcs.
Vector equilibrium modeled as dips in the arcs described triangle’s rotations in the jitterbug.
The third shell of radially close-packed, unit-radius spheres around a common nucleus consists of 92 spheres, a number that Buckminster Fuller did not consider coincidental. (See: Close-Packing of Spheres.) The Periodic Table of Elements, with its 92 stable elements ranging from hydrogen to uranium is after all the close packing of neutrons and protons. Also intriguing is the emergence, in the third shell, of eight new potential nuclei at the centers of the eight triangular faces.
Eight unique nuclei emerge in the third shell of radially close-packed spheres. The third shell contains 92 spheres, suggesting a correspondence to the number of stable atoms in the periodic table of elements.
If these eight spheres are added to the second shell’s 42 spheres, they constitute the corners of the first nucleated cube to emerge in the isotropic vector matrix.
The eight new nuclei that emerge in the third shell of the isostropic vector matrix are positioned at the corners of the first nucleated cube.
And if each is given its own shell of 12 spheres, we can see clearly their nuclear character.
The first nine nuclei to emerge in the isotropic vector matrix along with their 12-sphere shells. Colors identify shell number.
In the close-packed spheres model of the isostropic vector matrix, every sphere is surrounded by twelve others. Whether or not a given sphere in the close-packed array is a nucleus is an arbitrary choice. But the selection of one determines the the regular distribution of all the others.
Unique nuclei and their shells, as distributed in radially concentric layers 0 through 7 of isotropic vector matrix.
Connecting the centers of unique nuclei forms a grid of rhombic dodecahedra, fourteen around one, not twelve, as might be expected.
Vectors connecting unique nuclei in the isotropic vector matrix define a rhombic dodecahedron
Spherical domains close-pack as rhombic dodecahedra, twelve around one. Nuclear domains close pack like soap bubbles and foams, fourteen around one, and their domain is identical with the solution to the Kelvin problem: How can space be partitioned into cells of equal volume with the least area of surface between them? Fuller noted that the Kelvin truncated octahedron, initially proposed as the solution to the Kelvin problem, encloses nuclear domains.
Unique nuclei and their 12-sphere shells are distributed in the isotropic vector matrix as Kelvin tetrakaidecahedra (aka truncated octahedra).
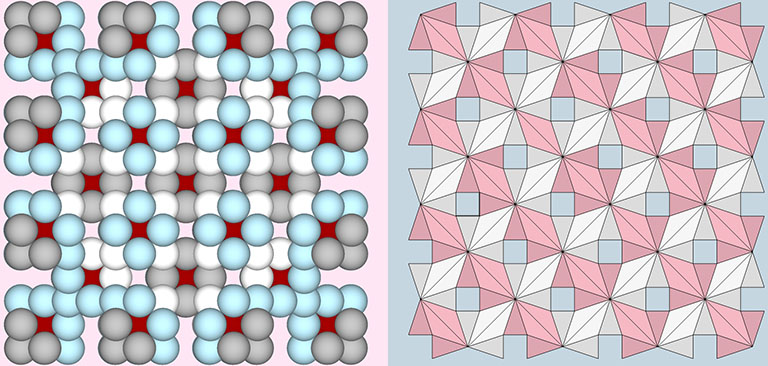
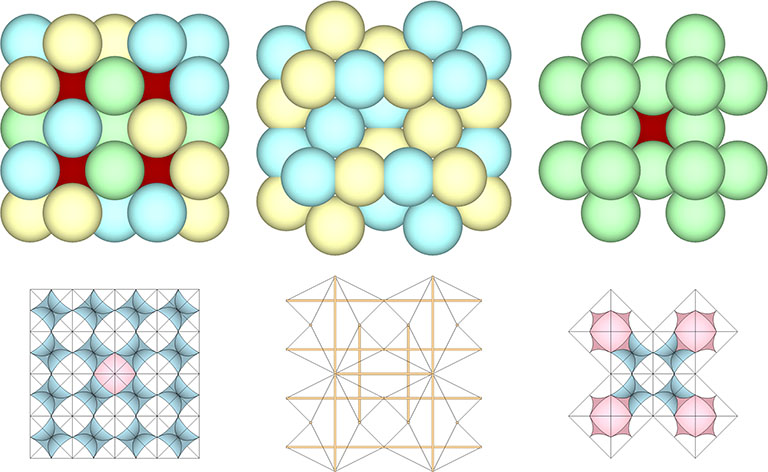
Presently, the best solution to the Kelvin problem is the Weaire-Phelan matrix consisting of Tetrakaidecahedron and Pyritohedron of equal volume. The distribution of nuclei in the isotropic vector matrix coincides beautifully with the Weaire-Phelan matrix, with unique nuclei (shown in red in the figure below) enclosed by pyritohedra, and nuclei whose shells are shared with their surrounding nuclei (shown as pink in the figure below) are enclosed by pairs of tetrakaidecahedra.
The Weaire-Phelan matrix isolates unique nuclei (red) inside pyritohedra. The surrounding matrix of paired tetrakaidecahedra encloses the nuclei whose shells are shared with surrounding nuclei (pink).
This distribution is perhaps easier to conceptualize if we separate out the pyritohedra and the tetrakaidecahedra.
The Weaire-Phelan matrix separated into pyritohedra (left), and tetrakaidecahedra (right), demonstrating their distribution with respect to the unique nuclei (left) and non-unique nuclei (right) in the isotropic vector matrix.
As noted earlier, unique nuclei are distributed on a grid of rhombic dodecahedra. The nuclei whose shells are shared with surrounding nuclei, however, are distributed on a grid of vector equilibria.
Unique nuclei (left) and non-unique nuclei (right) are distributed in the isotropic vector matrix as rhombic dodecahedra and VEs respectively.
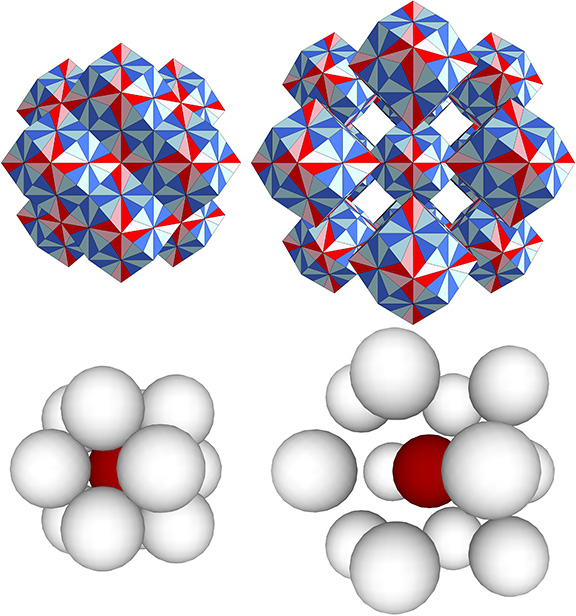
If the non-unique nuclei are removed from the matrix, they leave holes that run through the matrix along orthogonal paths. These are likely the same holes seen in the icosahedron phases of the jitterbug.
Left: Close-packed spheres of isotropic vector matrix showing nuclei (red) and their shells, with non-unique nuclei removed; Right: Vector model of the isotropic vector matrix at the Jessen orthogonal icosahedron phase of jitterbug, exactly midway through the transformation between VE and octahedron.
Regular icosahedra will not close pack to fill all space. They can however be edge-bonded to form continuous icosahedral shells which thoroughly isolate the interior from the outside. It is interesting that this recapitulates the 12-around-1 in the close packing of unit-radius spheres, as it does the 12-around-1 arrangement of rhombic dodecahedra in the quantum model of the isotropic vector matrix. This means that the shell volume formula for icosahedra is the same as for the radial close packing of spheres:
Icosahedron Shell Volume = 10F²+2
At the center of the F1 shell (12 regular icosahedra of unit edge length around a common center) is a concave pentagonal dodecahedron, a sort of exploded (inside-outed) version of the vertex-truncated icosahedron.
Twelve regular icosahedra can be edge-bonded to form an icosahedral shell that encloses a concave pentagonal dodecahedron.
At its center is an icosahedron with edge length (√5-1)/2, or the golden ratio (φ) minus 1, approximately 0.618034.
Connecting the faces of the unit-edge concave pentagonal dodecahedron defines and regular icosahedron with edge length φ-1.
Edge-bonded icosahedra can also form lattices of repeating hexagons.
Regular icosahedra may be edge-bonded to form a hexagonal lattice.
Note that this lattice is different from the lattices formed in the jitterbugging of the isostropic vector matrix. There, the lattices are formed of regular icosahedra and its space-filling complement. See: Icosahedron Phases of the Jitterbug.
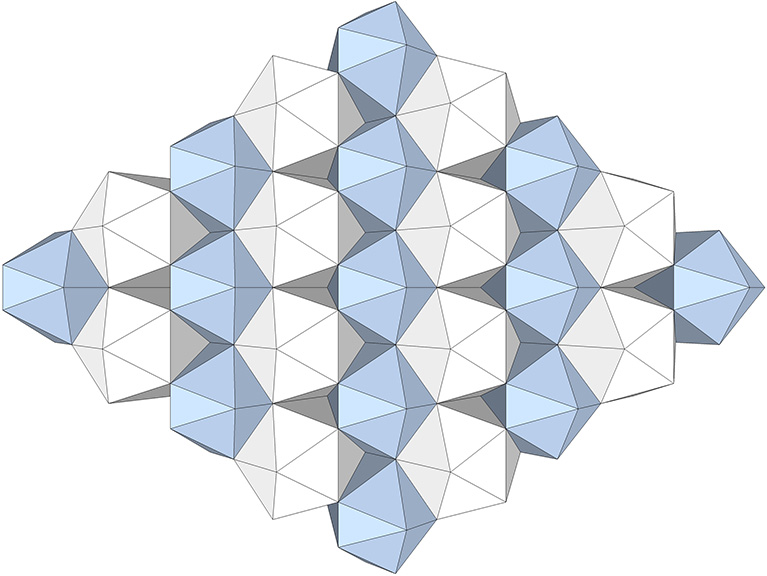
In the jitterbug transformation, the regular icosahedron (white) face-bonds with its space-filling complement (light blue) to form a rhombic lattice.
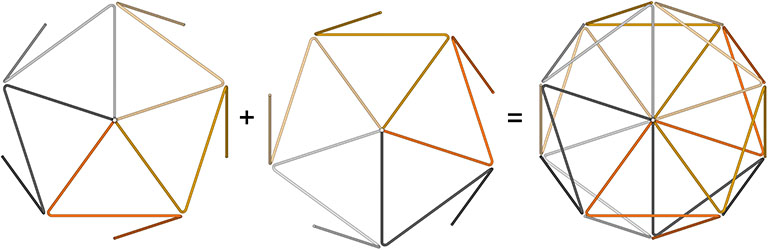
The regular icosahedron and its complement (as well as the Jessen orthogonal icosahedra at tensegrity equilibrium) close pack radially as well as laterally—naturally, as they constitute phases in the jitterbug transformations of the isostropic vector matrix. Note the difference between the close packing of icosahedra as they co-occur in the jitterbug, and the close packing of regular icosahedra around a common center. Here it is 14-around-1, not 12-around-1. Fourteen is the number of faces of the VE, and the number of VEs and octahedra surrounding the central VE in the jitterbugging matrix: six VEs face-bonded to its square faces; plus eight octahedra face-bonded to its triangular faces.
Six regular icosahedra (gray) and eight irregular icosahedra (pink) radially close-pack around a central icosahedron (and vice versa).
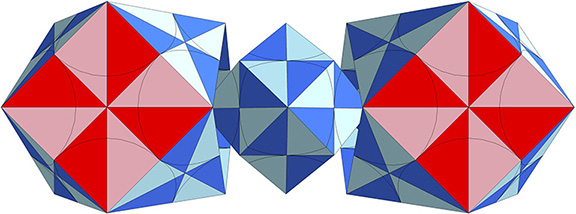
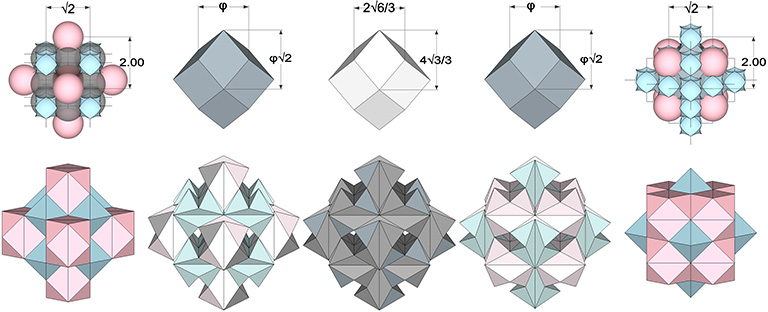
Vector equilibria and octahedra close pack as rhombic dodecahedra that expand and contract during the jitterbug transformation. Maximum expansion coincides with the phase which I call tensor (or tensegrity) equilibrium. It occurs at the precise midpoint of the transformation, when the vector equilibria and octahedra have both transformed into the Jessen orthogonal icosahedron which, not coincidentally, has the same shape as the six-strut tensegrity sphere. (See: Tensegrity.)
The short axis of the rhomboid faces increases from √2 at vector equilibrium, to φ at the icosahedron phases, and to 2√6/3 at tensegrity equilibrium. The long axes increase from 2.0 at vector equilibrium, to φ√2 at the icosahedron phases, and to 4√3/3 at tensegrity equilibrium.
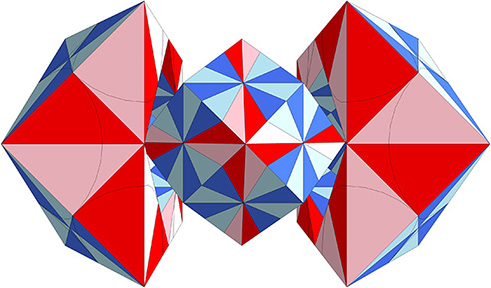
Connecting the centers of the close-packed vector equilibria and octahedra of the isotropic vector matrix describes rhombic dodecahedra that expand and contract during the jitterbug transformation. Spheres exchange places with spaces (top) and vector equilibria exchange places with octahedra (bottom). Maximum expansion occurs at the phase associated with the Jessen orthogonal icosahedron (middle of bottom row.)
The icosahedron and its complement exchange places twice per cycle as the matrix enters and exits tensegrity equilibrium.
The icosahedron and its complement exchange places twice per cycle as the matrix enters and exits tensegrity equilibrium
The angles of the rhombic lattice formed from the regular icosahedron and its complement correspond with the face angles of the rhombic dodecahedron and the dihedral angles of the regular tetrahedron, arctan(√2) and arctan(2√2)) or approximately 54.7356° and 70.5288°.
The rhombic lattice formed from the regular icosahedron and its complement. The rhombus has the same face angles as the rhombic dodecahedron, which are identical to the dihedral angles of the regular tetrahedron.
Regular icosahedra can form icosahedral shells of any frequency, but the shells do not nest inside one another. Note further that the shells do not occur as subdivisions of the lattice. That is, the regular icosahedron may form indefinite lattices or definite shells, but never both in the same matrix.
F2 Icosahedral shell consisting of 42 regular icosahedra, and its concave interior space.
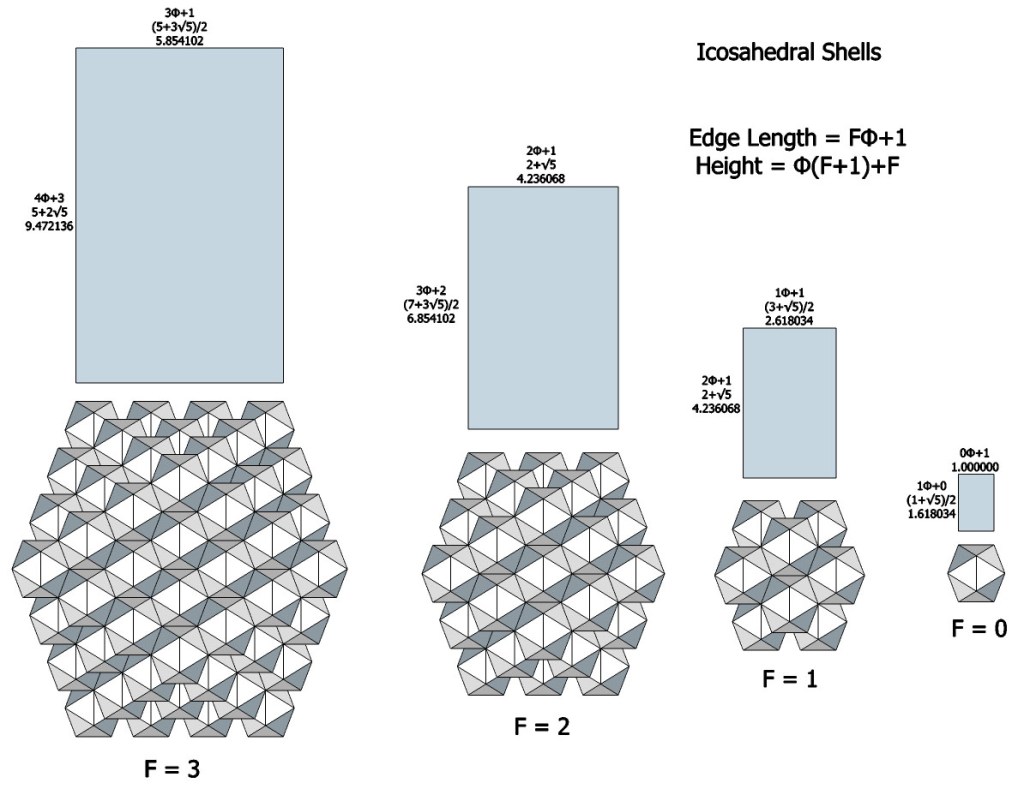
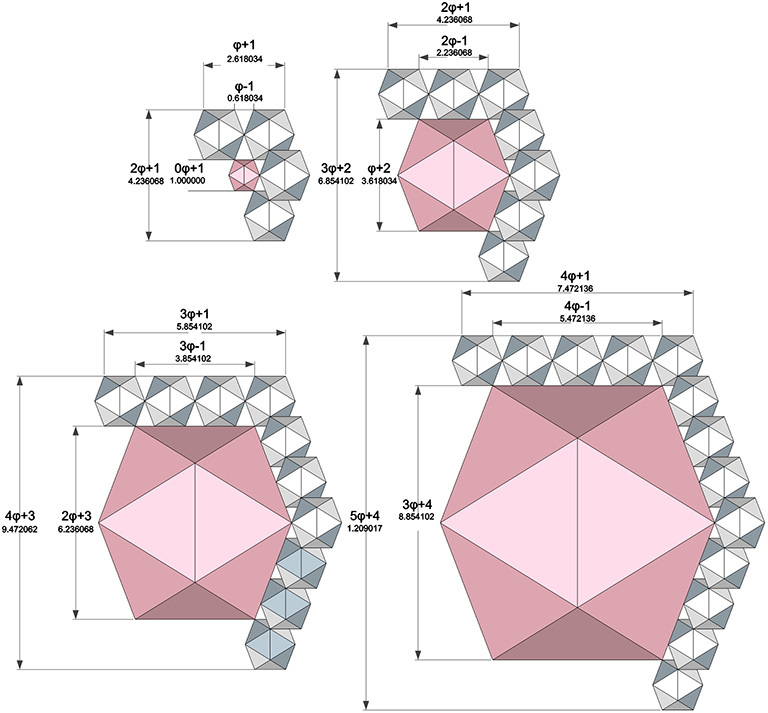
Given icosahedra of unit edge length, the edge length of any icosahedral shell is φ(F)+1, where φ is the golden ratio, (√5+1)/2, and F is the shell frequency. The height of the icosahedron, i.e. the linear dimension of its cubic domain, divided by its edge length is always φ, so the height of any icosahedron shell is φ times its edge length, that is, φ × [φ(F)+1], or φ²F+φ. But since φ²= φ+1, the equation can be rewritten as φ(F+1)+F.
The height times with width of any icosahedral shell is always the golden ratio
Icosahedral shells, F0 through F3, and their dimensions.
The inside dimensions of the shells follow similar formulas. A regular icosahedron filling the space inside a a shell of frequency F would have the following dimensions:
Note the pattern. The formulas for exterior and interior dimensions differ only by the plus and minus signs.
Exterior and interior dimension of the icosahedral shells, F1 through F4.
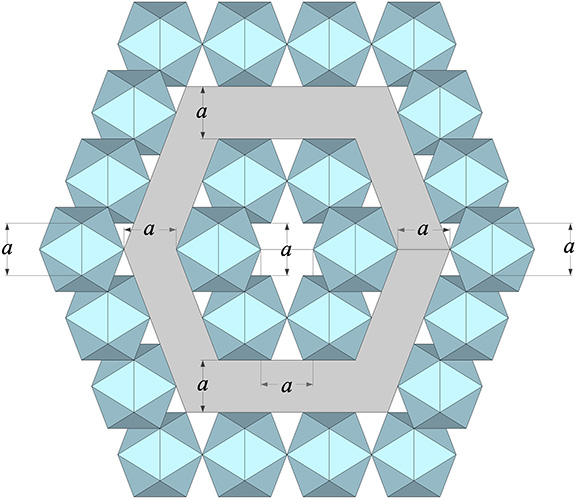
The largest icosahedral shell that can be enclosed within a shell of frequency F has a frequency of F-2. The gap between the two nested shells is always the same of the constituent icosahedron’s edge length. For example, given an edge-length of a for the constituent icosahedra, an F1 shell can fit inside an F3 shell with a gap of a between the F1 shell’s outer surface and the F3 shell’s inner surface.
The gap (a) between the two nested icosahedral shells is always the same of the constituent icosahedron’s edge length.
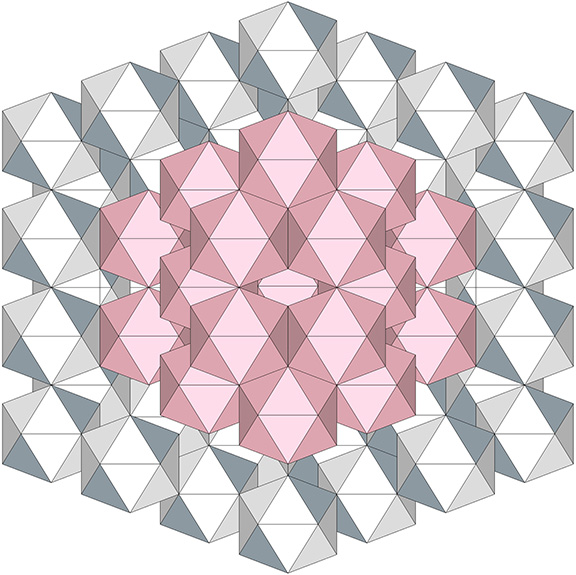
The F1 shell consists of 12 icosahedra. But if we allow for asymmetry, that is, if we allow the icosahedra to be slid out of alignment and into the cavities between adjacent icosahedra, it is possible to squeeze at least 31 icosahedra inside the F3 shell. The F1 shell is free to rattle around freely inside the F3 shell, but the motion of the 31-icosahedra aggregate seems to be restricted to, at most, just one axis.
if we allow the icosahedra to be slid out of alignment and into the cavities between adjacent icosahedra, it is possible to squeeze at least 31 icosahedra inside the F3 shell.
You can, of course, construct shells from shells, but the resulting shell would have holes. That is, the interior of the larger shell would not be fully isolated from the outside.
F1 Icosahedral shell constructed of twelve F1 icosahedral shells.
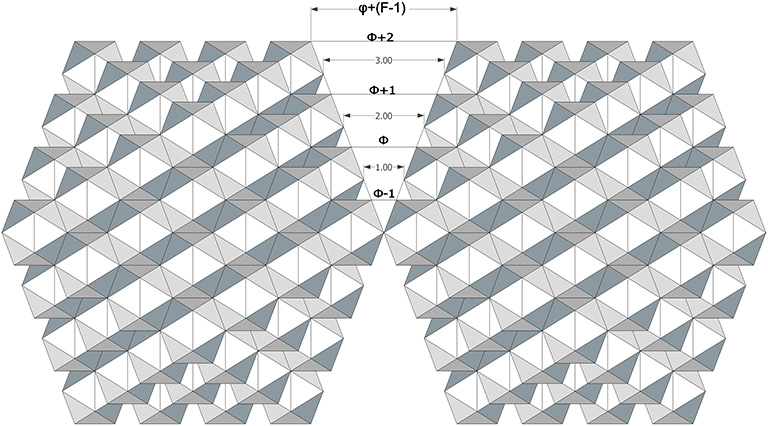
The opening between edge-bonded icosahedral shells is a rhombus whose short diagonal is φ+(F-1).
Gaps between adjacent icosahedral shells follow the formula, φ+(F-1).
The study of icosahedron shells may have implications for and resonance with the behavior of cell membranes and other semi-permeable barriers between systems.
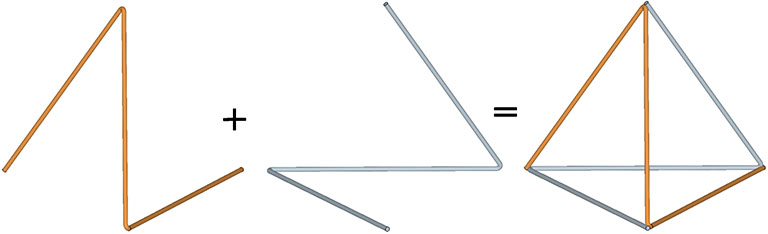
A tetrahedron may be constructed from two open-ended triangles.
Tetrahedron Constructed from Two Open-Ended Triangles
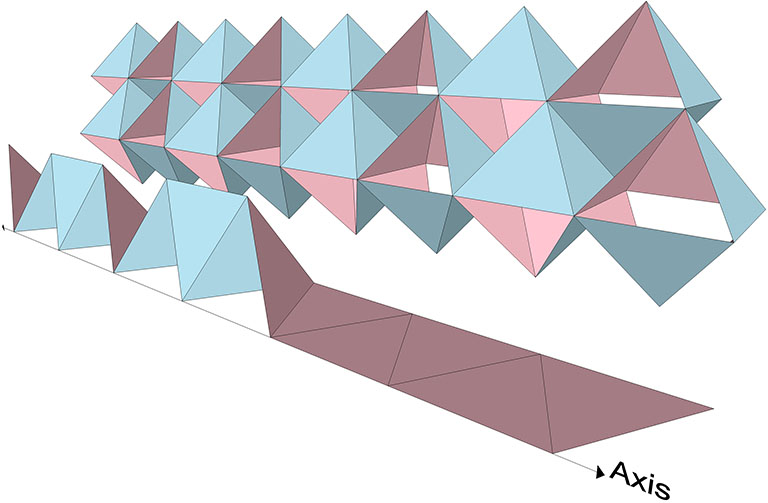
If we use this construction in the isotropic vector matrix, the open ends of each triangle join with similar triangles in the adjacent tetrahedra to form wave patterns that propagate linearly through the matrix, each oriented at 90° to the other. The entire matrix may be built though the duplication of orthogonally paired waves.
Transverse Waves in the Isotropic Vector Matrix
Significant to this model of the isotropic vector matrix is its demonstration of the fundamental principle that no two vectors may pass through the same point simultaneously. All vertices in the matrix redirect their vectors, rather than act as focal points for their convergence.
Deflecting Vectors at Vertices of the Transverse Wave Model of the Isotropic Vector Matrix
For each of the six axes of the isotropic vector matrix, i.e., the six vertex-to-vertex axes of spin of the vector equilibrium, there are four unique waves, two running clockwise and two running counter clockwise on either side of the axis, for a total of 24 (6×4) waves converging on and deflecting from every point.
For each of the six axes of the isotropic vector matrix, i.e., the six vertex-to-vertex axes of spin of the vector equilibrium, there are four unique waves, two running clockwise and two running counter clockwise on either side of the axis.
Note that the axis that defines the linear orientation of the wave is excluded from the wave itself which traces a path along three of the remaining five edge vectors of the tetrahedron. The clockwise and counter-clockwise waves of the positive and negative tetrahedra each share one leg oriented at 90° to the wave’s directional axis, underscoring the polarization of the pair.
The six axes of the isotropic vector matrix define the six edges of the tetrahedron. The waves from these six axes wrap around each tetrahedron such that each of its six edges includes a leg from four separate waves.
The neutral axes of six chains of open-ended equilateral triangles intersect to form a regular tetrahedron with four vectors per edge.
This recapitulates the quadrivalent (four vectors per edge) tetrahedron that results when the jitterbug is given an extra 180° twist.
With a 180° twist, the jitterbugging VE can be collapsed into a regular tetrahedron with four vectors per edge.
This wave pattern can also be modeled with continuous ribbons of equilateral triangles which are then folded at the same angles as the three vectors of the open-ended triangle above.
The isotropic matrix modeled by the folding of a linear ribbon of equilateral triangles mirrors the transverse wave model of open-ended triangles.
The octahedron can be constructed from four open-ended triangles.
Four open-ended equilateral triangles combine to form the regular octahedron.
The open-ended triangles of the octahedron may be joined in parallel linear waves that form a continuous chain of octahedra.
The open-ended triangles of the octahedron joined in four parallel linear waves forming a continuous chain of octahedra.
The icosahedron can be constructed from ten open-ended triangles.
Ten open-ended equilateral triangles combine to form the regular icosahedron.
There are numerous ways of joining the open-ended triangles of the icosahedron end-to-end, but all form wave-dispersal patterns in which the icosahedron appears never to repeat.
Joining the open-ended triangles of the regular icosahedron forms a wave-dispersal pattern that appears to never repeat the original icosahedron.
“The geometrical model of energy configurations in synergetics is developed from a symmetrical cluster of spheres, in which each sphere is a model of a field of energy all of whose forces tend to coordinate themselves, shuntingly or pulsatively, and only momentarily in positive or negative asymmetrical patterns relative to, but never congruent with, the eternality of the vector equilibrium. […] Synergetics is comprehensive because it describes instantaneously both the internal and external limit relationships of the sphere or spheres of energetic fields; that is, singularly concentric, or plurally expansive, or propagative and reproductive in all directions, in either spherical or plane geometrical terms and in simple arithmetic.” — R. Buckminster Fuller, Synergetics, 205.01
The point in conventional geometry is replaced by the sphere in Fuller’s geometry. Vertices are the geometric centers of spheres, and vectors connect sphere centers. There are no continuous lines. Surfaces and volumes are point populations, i.e., close-packed spheres or the vertices that define the sphere centers. The minimum point is defined as a vector equilibrium (VE) of zero frequency, i.e. the nuclear sphere. The shell volume of the zero-frequency VE is give by the shell-growth formula for radially close-packed spheres, 10F²+2, as “2,” i.e., the inside surface, plus the outside surface. Unity is plural and at minimum two.
Every sphere has two surfaces, one convex and the other concave. The concave (interior) surface resists compressive forces while the convex (exterior) surface resists tensile forces.
Bending pressure results in tension along the outside of the curve, and compression along the inside of the curve.
In the following illustration, cutaways of the sphere show the concave interior surface (pink) under compression, and the convex exterior surface (blue) under tension.
A sphere holds its shape by balancing the tensile forces of its outer surface (blue) with the compressive forces of it inner surface (pink).
These two forces can be modeled as the radials and circumferential vectors of the vector equilibrium (VE). In the following illustration the radials are represented by rigid struts which resist the compressive force provided by the circumferential vectors represented by elastic bands which in turn resist the tensile force provided by the rigid struts.
The tensile forces of the circumferential vectors of the VE (blue) are balanced by the compressive forces of its radial vectors (brown).
The tensegrity model clearly represents the inter-dependence of the two forces, with the convex tension represented by continuous tendons, and the concave compression represented by the discontinuous struts.
The tensile forces of the 6-strut tensegrity’s continuous tendons are balanced by the compressive forces of its discontinuous struts
In the bow tie model, concave and convex are disclosed as opposite sides of the four great-circle disks that comprise the spherical VE. The combined surface areas of the four disks is the same as the surface area of the sphere they describe. In the illustration below, the two sides are distinguished by color, one pink and the other blue.
In this model of the vector equilibrium (VE), the inside and outside surfaces of the sphere are disclosed as opposite sides of four great-circle disks folded into bow-ties. Their combined surface areas exactly equals the surface ares of the sphere they describe.
In the quanta model, the two forces are represented by the integrative A modules and the dis-integrative B modules. The close packed spheres and spaces which exchange places in the jitterbug, are represented by two rhombic dodecahedra, one being the inside-out version of the other.
The quanta-module construction of the rhombic dodecahedron models the transformation between spheres or spaces in the isotropic vector matrix by turning itself inside out.
The first of the two rhombic dodecahedra has at its core a concave octahedron made entirely of B modules. This core is completely enveloped by A modules, first forming a regular octahedron, and then the rhombic dodecahedron. It suggests an implosive, integrative event.
Quanta module construction of a space.
The second of the two rhombic dodecahedra exposes all of its modules, both A and B, on its surface. None are entirely contained by the others, and it suggests an explosive, dis-integrative event.
Quanta module construction of a sphere.
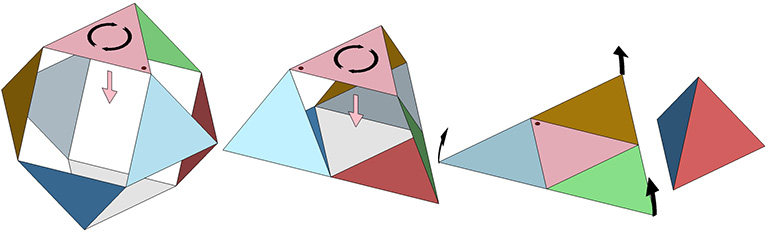
In the jitterbug transformation of the quanta model, the two rhombic dodecahedra exchange places, suggesting one is the explosive space (the expanding octahedron) which takes the place of the imploding nucleus (the contracting VE). This concept may be more clear if we look at the transformations of the core in isolation from the shell.
The core of the the two quanta module constructions of the rhombic dodecahedron. The B quanta modules point outward (sphere) or inward (space).
The B modules are arranged in arrow-like shapes that point their faces inward in the transformation from VE to octahedron (contracting nuclei), and outward in the transformation from octahedron to VE (expanding spaces). Fuller’s intuitions about the energy characteristics of the two modules, entropic for the B quanta modules, syntropic for the A quanta modules, seem all the more inspired the more deeply we look into the geometry.
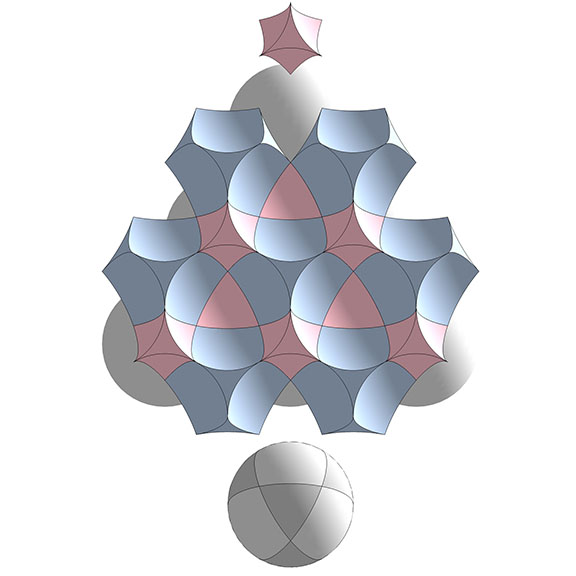
In the interstitial model of the isotropic vector matrix (see Spaces and Spheres Redux), the two forces are made self-evident in the literal exposure of the of the concave interior and convex exterior surfaces of the spheres, represented here as blue concave VE “spaces”, gray convex VE spheres, and pink concave octahedra interstices.
The interstitial model of the isotropic vector matrix exposes the concave inside surfaces of the spheres, as well as the four great circles of the vector equilibrium whose vertices are the points of contact between adjacent spheres.
I stumbled across a rigid structure that seems to be a cross between a tensegrity prism, a polyhedron, and a tetrahelix.
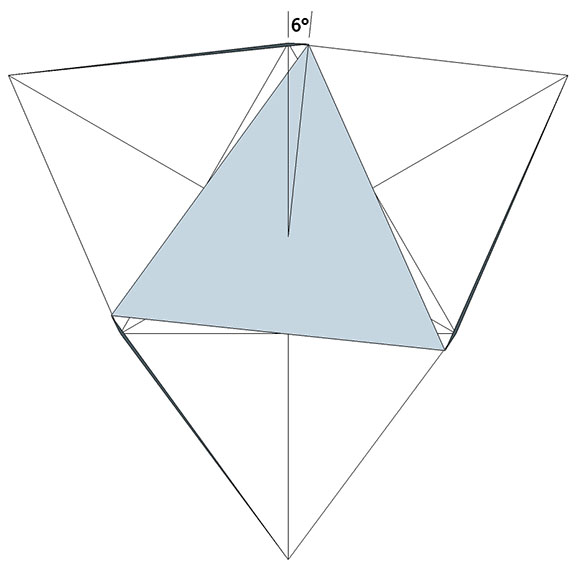
Eight vertex-bonded equilateral triangles arranged into structural helix with a twist of six degrees per module.
I find it curious because a) it doesn’t seem to conform to the triangulation rule for rigid structures, b) it looks like it ought to be tensegrity prism, but it isn’t obvious which of the vectors can be replaced with tendons, and c) the top and bottom triangles are twisted at exactly six degrees, or 1/60th of a full 360° cycle.
In each module of the structural helix, the top triangle is rotated six degrees from the bottom triangle
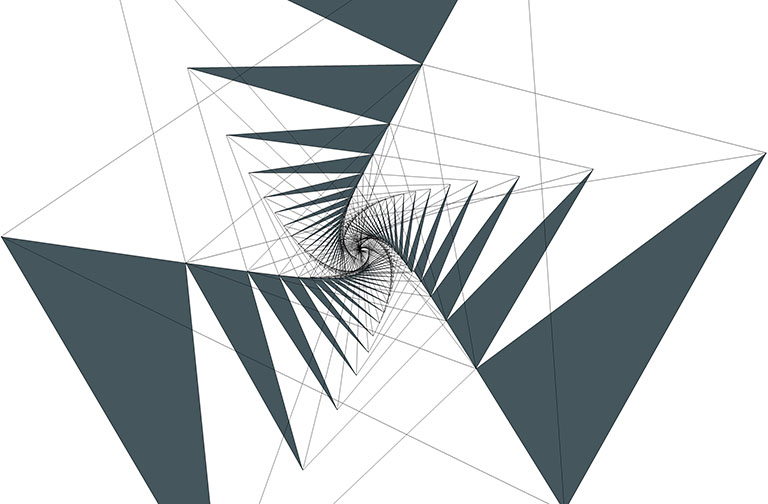
Stacking one on top of another is also quite beautiful.
Top view of the helix constructed from twenty modules with a combined rotation of 120 degrees.
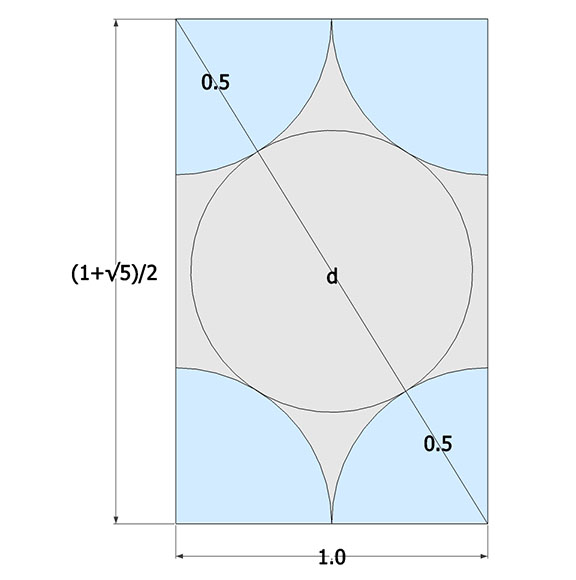
If a spherical nucleus were at the center of a close-packed array of spheres in the icosahedron configuration, what would be its radius? That is, by how much must the nucleus shrink when the close-packed array jitterbugs from the VE to the icosahedron? Knowing that the icosahedron can be constructed from the three golden rectangles arranged orthogonally around a common center, it’s a simple matter of trigonometry.
The regular icosahedron can be constructed from three intersecting golden rectangles.
The diagonal, d, of the regular icosahedron is equal to the diagonal of the golden rectangle from which it is constructed. The diameter for the center circle is d-1.
The diagonal (d) is the the square root of the sum of the squares of the two sides, or √(((1+√5)/2)+1²) ≈ 1.902113:
The diameter of the nucleus at the center of an icosahedron made up of unit-radius spheres is the length of the diagonal minus 1, or approximately 0.902113.
The golden ratio has some curious properties. For example, its square is equal to itself plus one:
Knowing this, we can reduce the expression under the radical above to ((1+√5)/2)+2:
Since the expression on the left is the golden ratio, it follows that the diagonal of the icosahedron may be expressed as √(2+φ):
The isotropic vector matrix can be modeled as vectors, struts and tendons, quanta modules, or as spheres and their interstices. All these models originated in Fuller’s geometry with the close packing of unit-radius spheres—ping-pong balls or Styrofoam spheres he glued together. We may be tempted to think of these spheres, as we used to the think of atoms, as solid and indivisible. But by now we should be accustomed to thinking of these fundamental particles as divisible into obscure quanta with strange properties, as clouds of energy, or as waves in a quantum field. So it may not bother us to see these otherwise solid spheres merging and diverging in the spherical model of the jitterbug.
The jitterbug as a single VE with its vertices represented by unit spheres.
But if we think of the spheres as quanta, their number, by fundamental conservation laws, should remain constant throughout the jitterbug. If we assume one sphere per vertex, what is the ratio of vertices in the isotropic vector matrix compared to the matrix at tensegrity equilibrium? The former includes the nuclei which are replaced by the six struts in the tensegrity model. But it does not appear that those make up for the increase in the number of vertices, i.e. shell vertices plus nuclei in the vector model do not add up to the number of vertices in the tensegrity model. Where do the extra spheres/vertices come from?
Fuller thought the vectors, whose length defines the sphere diameter, were a constant in the jitterbug. But it appears that the true constant in the jitterbug is the length of the diagonal, i.e. the length of the struts in the tensegrity model. If we hold the strut length constant, the spheres do not fully divide in the icosahedron phases of the jitterbug. When the jitterbug is conceived as an unbounded matrix, the spheres never divide without simultaneously merging with neighboring spheres (which are also dividing).
The partial division of the spheres that reaches its maximum at the Jessen phase, i.e., at tensegrity equilibrium, might be conceived as the counterpart to the separation of tension and compression in the tensegrity model. That is, the spheres’ convexity (tension) and concavity (compression) are being isolated in the same way that the tendons (tension) and struts (compression) are isolated in the tensegrity model.
The jitterbug, oscillating into and out of tensegrity equilibrium. Note that maximum division of the spheres occurs between, not at, the vector equilibrium phases.
In the figure below, this division of spheres into the convex and concave counterparts is represented by green spheres dividing (partially) into blue and yellow spheres, and then recombining into green spheres.
Three phases of the jitterbug represented as unit spheres (top), as spaces and interstices (bottom left and right), and by six-strut tensegrity spheres (bottom middle). The green spheres partially divide into blue and yellow spheres in the icosahedron phases of the jitterbug (top middle. Each blue-yellow pair constitutes one sphere.
Isotropy is restored when the VE contracts into an octahedron and when the octahedron expands to the VE. But in between, when both shapes describe regular or irregular icosahedra, the only constant is the strut length which (if the vectors at equilibrium are of unit length) is equal to √2, the diagonal of the unit-edged cube.
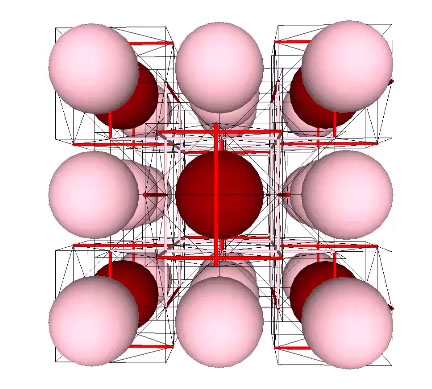
The increase in the number of vertices is modeled in the tensegrity model of the jitterbug as the merging and diverging of struts. The struts, like the spheres, are doubled up at vector equilibrium, and do not quite fully separate at tensegrity equilibrium. In the figure below, the nuclei in the sphere model have been superimposed onto the tensegrity matrix at vector equilibrium. The red nuclei are associated with 12-sphere shells unique to that nucleus. The pink nuclei share their 12-sphere shells with the surrounding nuclei. (See Formation and Distribution of Nuclei in Radial Close-Packing of Spheres.)
The distribution of nuclei superimposed onto the tensegrity model at vector equilibrium.
To see how the struts in the tensegrity model serve the same purpose as the nuclei in the sphere model, imagine the tensegrity jitterbug with the struts squeezed together into the octahedron configuration. As the struts separate, imagine unit-radius spheres centered at each of their ends. They start out as porous clouds but harden into impenetrable spheres just as the struts have separated into the VE configuration. The tensegrity-plus-spheres model is at equilibrium, with the spheres and struts both supplying compression resistance to the tension web of tendons. The de-nucleated sphere shell will not collapse into an icosahedron as long as the struts remain rigid.
The tensegrity model at vector equilibrium, when coupled with the spheres model, holds the spheres in the same 12-around-1 configuration as radially close-packed spheres around a common nucleus.
This model underscores Fuller’s proposition that gravity is a 90° precessional effect. That is, mass-attraction is modeled here by the tension web, the chords between the sphere centers which are situated at right angles to the radial vectors which would otherwise connect each to their common nucleus. The nucleus of the radially close-packed spheres model has here been replaced with the struts of the tensegrity model.