If we close-pack 12 spheres around a central nucleus and then remove the central sphere, the remaining spheres are free to rotate along twelve axes perpendicular to the radii connecting the sphere centers with their common center. The combined axes describe the regular octahedron.
With the nuclear sphere removed, the surrounding twelve spheres rotate freely as synchronous gears
We can also replace the spheres by wheels, which is mesmerizing, though perhaps not very helpful to conceptualizing the geometry.
De-nucleated VE with spheres reduced to disks
The effect is related to, but not identical with the jitterbug. Both are related to the removal of the nucleus, but with the jitterbug, there are only four axes of spin, and these are identical with, rather than perpendicular to, the radii.
The classic model of the jitterbug
This is perhaps made more clear if we replace the eight triangles of the classic model of the jitterbug with eight wheels rotating synchronously on the four radial axes of the cube.
The eight triangles of the classic model of the jitterbug replaced with wheels rotating on the four radial axes of the cube.
The eight wheels may be replaced with spheres.
The eight triangles of the classic model of the jitterbug replaced with spheres.
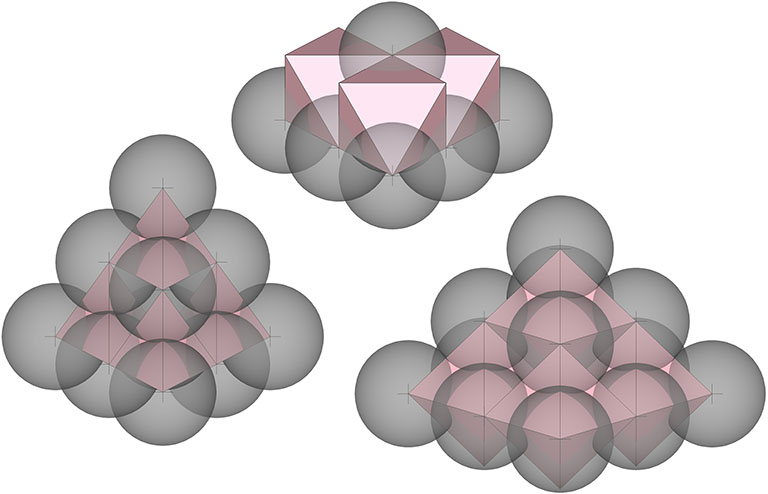
It may seem that there are at least three ways of stacking cannonballs, i.e., from a triangular base to form a pyramid with three sides; from a square base to form a pyramid with four sides; or as a shallow 3-sided pyramid.
The three standard methods of stacking unit-radius spheres: regular tetrahedron (left); one-quarter tetrahedron (center); and one-half octahedron (right).
All three methods of stacking unit-radius spheres are really just different ways of looking at the single method of the radial close-packing of spheres around a central nucleus.
The jitterbug transformation is conventionally modeled as hinged vectors and rotating triangles. But as the vertices are meant to model sphere centers, I’ve here replaced the vertices of the vector equilibrium (VE) with spheres.
Twelve unit-radius spheres close pack around a central nuclear sphere in the shape of the vector equilibrium (VE).
The doubling up of edges at the octahedron phase in the vector model of the jitterbug is represented in the sphere model of the jitterbug by merging and diverging unit-radius spheres. Different views and rotations of the model reveal some interesting characteristics of the transformation. If the view is synchronized with the rotation of the top and bottom triangles, the transformation resembles a pump with spheres orbiting around its equator.
Sphere model of the jitterbug with top and bottom triangles fixed and viewed perpendicular to the equator.
With the view perpendicular to one of the square faces of the VE, and without rotation, the spheres merge and diverge at right angles.
Sphere model of the jitterbug viewed perpendicular to one of the VE’s square “faces”.
With the view perpendicular to a fixed triangular face, the remaining spheres rotate around the equatorial axis.
Sphere model of the jitterbug viewed perpendicular to a fixed triangular “face”.
The isotropic vector matrix can be modeled as spheres, vectors, tensegrities, space-filling polyhedra, or as the concave polyhedra occupying the spaces and interstices between radially close-packed spheres. The space between radially close-packed spheres is a continuous web of concave octahedra and concave vector equilibria (VEs).
Six spheres close-packed as octahedra surround a nuclear space (“Space”) in the shape of a concave VE, whose volume is slightly less than 1/3 that of the sphere, and slightly more than 1/3 that of the octahedron. The following volumes are all measured in unit tetrahedra. See Areas and Volumes in Triangles and Tetrahedra.
The tetrahedral volume of the concave VE space at the center of six close-packed unit-diameter spheres is the volume of the unit octahedron (4) minus the the volumes of six 1/10 spheres.
Volume of concave VE “space” = 4 – 3π√2/5 ≈ 1.334270237 ≈ 33.356755928% the volume of the unit octahedron ≈ 33.298224115% the volume of the unit-diameter sphere
Concave VEs define the “spaces” at the centers of octahedra in the isotropic vector matrix.
Four spheres close-packed as tetrahedra surround an interstitial space (“Interstice”) in the shape of a concave octahedron, whose volume is a little more than 11% that of the tetrahedron, and a little more than 2.5% that of the sphere.
The tetrahedral volume of the concave octahedron interstice at the center of four close-packed unit-diameter spheres is the volume of the unit tetrahedron (1) minus the the volumes of four 1/20 spheres.
Volume of concave octahedron “interstice” = 1 – π√2/5 ≈ 0.111423412 ≈ 11.1423412% the volume of the tetrahedron ≈ 2.5079079% the volume of the sphere
Concave octahedron define the “interstices” between spheres arranged as tetrahedra in the isotropic vector matrix.
The space-to-sphere ratio of the VE is about 44.5/55.5
(6 × volume of concave VE) + (8 × volume of concave octahedron) ≈ 8.00562+ 0.89139 ≈ 8.89701 ≈ 44.485043608% the volume of the VE (20) ≈ 25.031631616% the the volume of the VE’s circumsphere (volume about 35.543)
The space between radially close-packed spheres in the isotropic vector matrix is defined by concave VEs and concave octahedra.
The space-to-sphere ratio of the cube is about 31.5%
(5 × volume of concave VE) + (8 × volume of concave octahedron) ≈ 6.67135 + 0.89139 ≈ 7.56274 ≈ 31.51142% the volume of the cube (volume 24)
The space between the close-packed unit spheres constituting the cube is defined by twelve concave VEs and six concave octahedra surrounding a nuclear concave VE space.
In the jitterbug transformation, the spheres and spaces exchange places. The concave VEs become convex VEs (and vice versa) in a transformation that can be described as turning themselves inside-out.
In the jitterbug transformation, spheres and spaces exchange places by turning themselves inside-out.
When modeled in quanta modules, the exchange takes place between the two distinct constructions of rhombic dodecahedra, the one found at the center of the VE (the sphere, or convex VE), and the other at the center of the octahedron or cube (the space, or concave VE).
The sphere-to-space, space-to-sphere inside-outing of the jitterbug transformation modeled with the two quanta-module constructions of the rhombic dodecahedron.
The jitterbug transformation can also be described by the polarity reversal of the tetrahedra. This is manifested in the vector model by the two tetrahedra, one positive, and one negative, that the rotating triangle in the jitterbug alternately describes.
An isolated triangle from the vector model of the jitterbug transformation alternately defining a positive and a negative tetrahedron.
The polarity reversal of the tetrahedron may be modeled as a 90° rotation. Each tetrahedron is rotated ninety degrees in the transition between the VE and octahedron phases, turning their respective concave octahedron into orientations that describe either a sphere or a concave VE space at their common center.
The polarity reversal of the tetrahedra modeled by their 90° rotations in the interstitial model of the jitterbug.
Again, this correlates beautifully with the quanta-module model. Eight quanta-module cubes (each containing a tetrahedron) are rotated 90° to alternately reveal one of the two quanta-module constructions of the rhombic dodecahedron at their common center—one representing the sphere, and one representing the space.
The polarity reversal of tetrahedra in the jitterbug transformation modeled by the 90° rotation of cubes in the quanta-module model of the jitterbug.
Because the concave octahedron interstices remain constant when the spheres and concave VE spaces exchange places in the jitterbug transformation, their volumes cancel out, and the sphere-to-space ratio of the isotropic vector matrix as a whole is identical with the ratio of volumes of the sphere and concave VE space. That is, the ratio of space to sphere is approximately 2:3.