“You can “draw a line” only on the surface of some system. All systems divide Universe into insideness and outsideness. Systems are finite. Validity favors neither one side of the line nor the other. Every time we draw a line operationally upon a system, it returns upon itself. The line always divides a whole system’s unit area surface into two areas, each equally valid as unit areas. Operational geometry invalidates all bias.” —R. Buckminster Fuller, Synergetics, 811.04
All of Fuller’s geometry is “operational” in the sense that it is conveyed and verified by physical models. The operations of synergetics includes constructions of sticks and flexible connectors, quanta modules, struts and string, wire, elastic cord, paper disks, clusters of ping-pong balls, a list of materials and operations limited only by our imaginations. Science without models is like language without metaphor. In the absence of metaphor, language is merely encoded logic. And without models, Fuller argued, science is equally impoverished. We need metaphor to formulate and articulate as yet unidentified concepts, and models are the metaphors of science. (See: Model Making.)
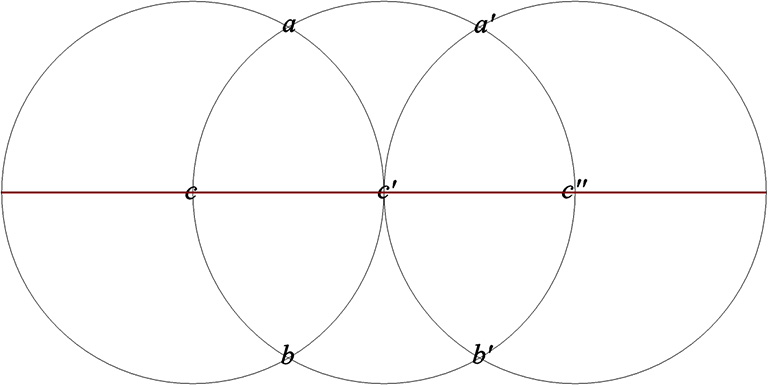
By way of introducing his operational geometry, Fuller would recall the basic operations of Euclidean geometry. Anyone who’s been through grade school has probably been taught how to use a draftsman’s compass, a straight edge, and a pencil, to repeat the familiar operation by which to find the perpendicular to a line and to construct an equilateral triangle.
Begin by drawing a circle with the dividers of the compass tightened to a fixed radius. Next, with the straight edge, draw a line from its center (c) to the circle’s perimeter. Fix the compass on the point where the line crosses the circle’s perimeter (c’) and draw another circle. Repeat and draw a third circle centered at the point where the straight line crosses the perimeter of the second circle (c”).
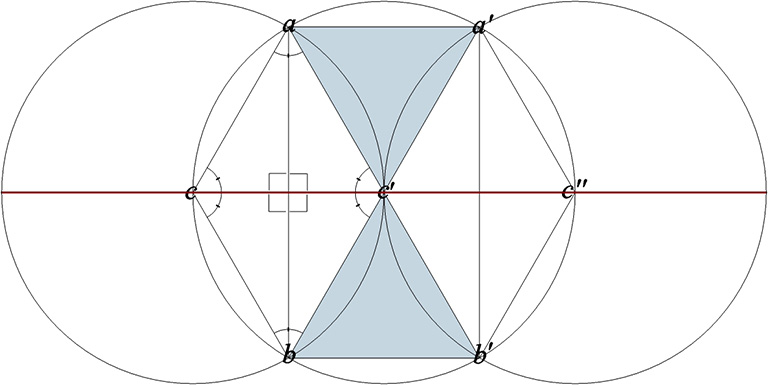
Now you have three circles bisected by a straight line running through the the circle centers, c, c’, and c”. The second circle crosses the first at two points, a and b. The third circle crosses the second at two points, a’ and b’. Lines drawn from a to b, and from a’ to b’ are perpendicular to the line drawn between the circle centers. Finally, draw lines between adjacent points to create six equilateral triangles in the shape of a hexagon.
Fuller often argued that the key shortcoming of plane geometry is its failure to account for the surface on which its operations are performed. The surface is a tool, just like the dividers, the straight edge, and the stick we scratch the surface with.
With the surface in mind, Fuller re-imagined the above operations as follows:
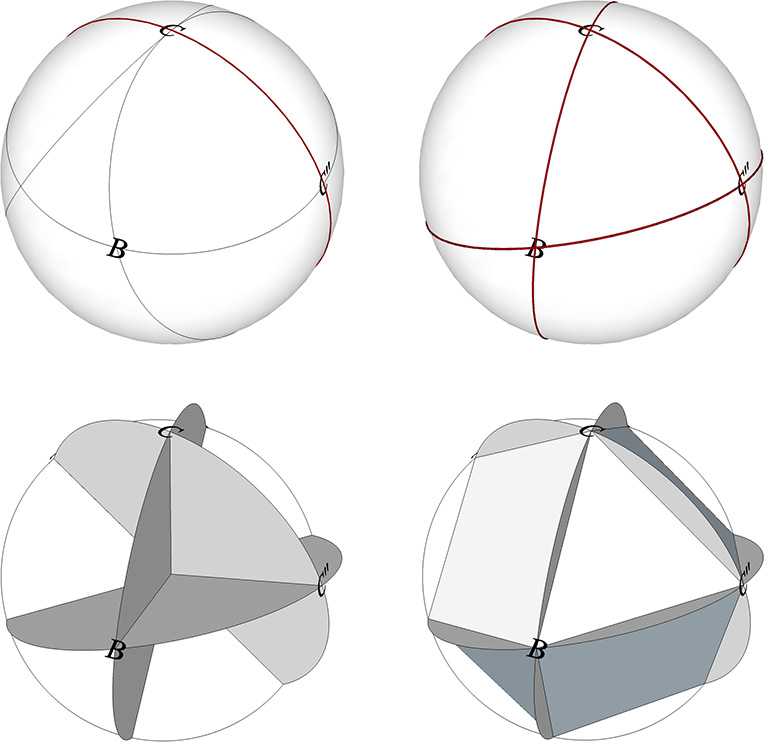
Begin by scribing a sphere. Granted, it isn’t possible to “scribe a sphere.” But we can imagine the process and perform the remaining operations on the surface of the sphere whose radius we are assured is identical with the fixed distance between the dividers of our compass. Mark a center anywhere on the sphere’s surface and draw a circle using the same compass. Next, just as before, draw a straight line from the center (C) to a point on the circle’s perimeter. And, remembering that straight lines on curved surfaces are, by definition, geodesics, we can continue drawing the line until it returns to the circle’s center and divides the sphere into two equal halves. Next, center the compass on one of the two points where the line crosses the perimeter of the circle and draw a second circle. Repeat, as above, to draw a third circle.
Now, when we connect the points as before with straight-line geodesics, we find that we have drawn four great circles. We know, operationally, that the length of the chords between the points is identical with the the sphere’s radius.
We have inadvertently constructed the eight equilateral triangles and six square faces of the vector equilibrium (VE). If we connect the points with the sphere center we create the eight tetrahedra and six half-octahedra that form the core of the isotropic vector matrix. And we have done it all operationally, without any calculations, and using only a compass, straight edge, and pencil.
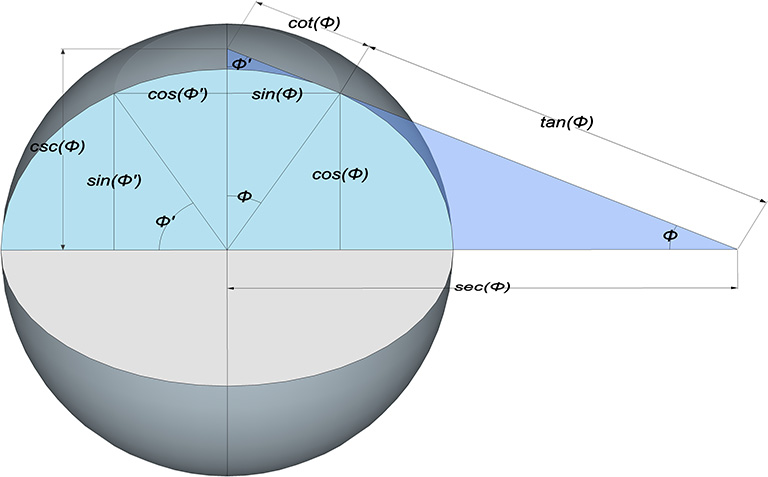
Fuller considered plane geometry to be a special case of the more general field of spherical trigonometry and topology. The Euclidean plane is a hemispheric section sliced through the middle of the sphere, and plane geometry is then the measurement of the chords whose central angles define the arcs of great circles drawn on the sphere’s surface.
All surfaces are curved. The flat surface in plane geometry is an abstraction, shown here as the hemispherical section of a sphere. Plane geometry is a special case of the more general spherical trigonometry and topology.
“… we observe the child taking the “me” ball and running around in space. There is nothing else of which to be aware; ergo, he is as yet unborn. Suddenly one “otherness” ball appears. Life begins. The two balls are mass-interattracted; they roll around on each other. A third ball appears and is mass-attracted; it rolls into the valley of the first two to form a triangle in which the three balls may involute-evolute. A fourth ball appears and is also mass-attracted; it rolls into the “nest” of the triangular group. . . and this stops all motion as the four balls become a self-stabilized system: the tetrahedron.“ —R. Buckminster Fuller, Synergetics, 100.331
“The mathematics involved in synergetics consists of topology combined with vectorial geometry. Synergetics derives from experientially invoked mathematics. Experientially invoked mathematics shows how we may measure and coordinate omnirationally, energetically, arithmetically, geometrically, chemically, volumetrically, crystallographically, vectorially, topologically, and energy-quantum-wise in terms of the tetrahedron.” —ibid., 201.01
Nature’s simplest structural system is the tetrahedron. Regular tetrahedra, however, do not combine to fill all-space (as do cubes, for example). In order to fill all-space, the regular tetrahedron must be complemented by the regular octahedron. Together they produce what Fuller conceived as the simplest, most powerful structural matrix in the universe, the octahedron-tetrahedron matrix, which he was able to patent in 1961 and subsequently copyright under the trademark name, the “octet truss.”
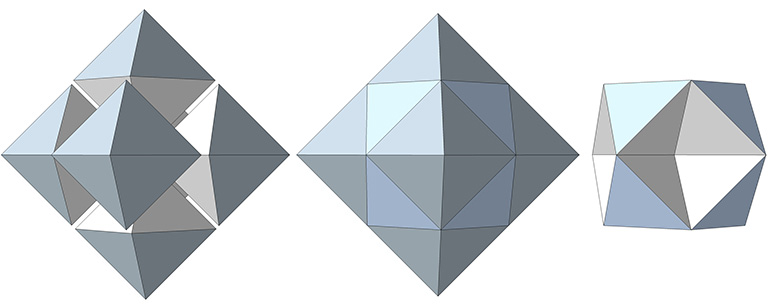
This complementary relationship between the tetrahedron and its space-filling counterpart, the octahedron, is demonstrated by stacking four tetrahedra vertex-to-vertex to create a larger tetrahedron. In doing so, we discover that we have inadvertently produced an octahedron at its center.
Stacking tetrahedra, vertex-to-vertex, to form a larger tetrahedron inadvertently produces an octahedron at its center. The two combine to fill all-space.
Fuller considered this system of all-space-filling tetrahedra and octahedra to be nature’s own coordinate system: the isotropic vector matrix.
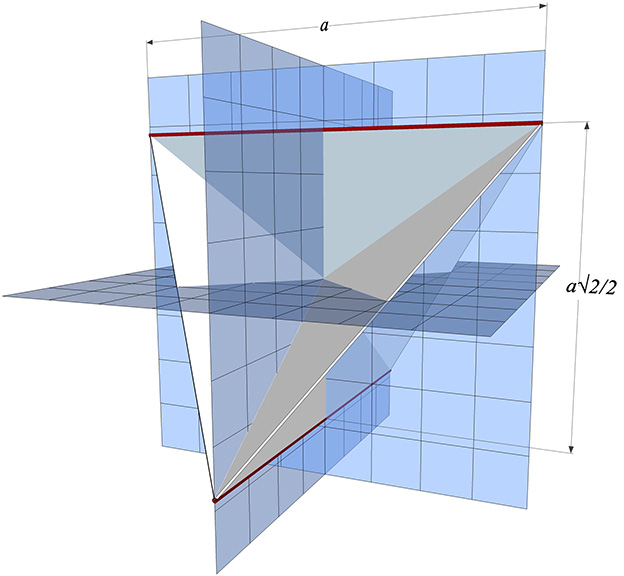
The regular tetrahedron is perhaps most easily conceived on the orthogonal grid as two unit length edges separated by a distance of √2/2 and oriented at 90° to the other (thick red lines in the figure below). Connecting their endpoints forms the the regular tetrahedron of edge length, a.
The regular tetrahedron constructed from coordinates on the orthogonal grid.
The Regular Tetrahedron
a = edge length
4 equilateral triangle faces, 4 vertices, 6 edges
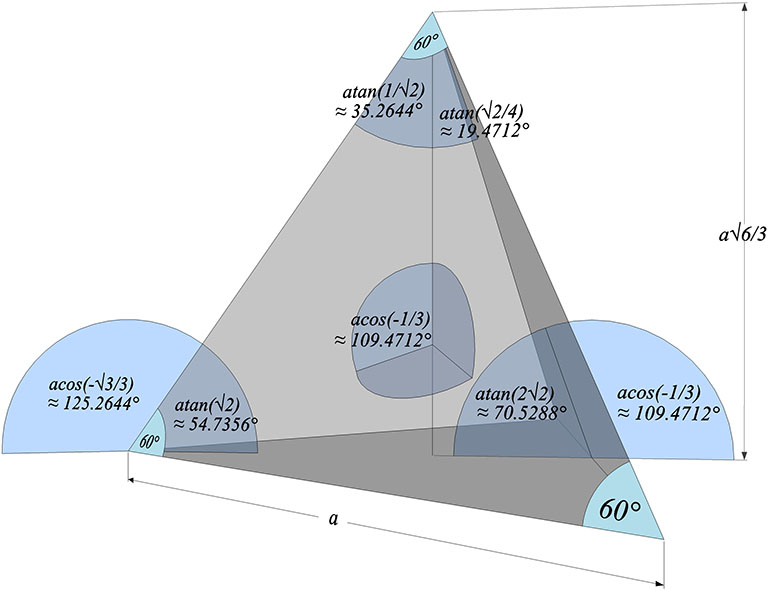
Face angles all 60°
Central angles all arccos(-1/3) ≈ 109.4712°
Dihedral angle: atan(2√2) ≈ 70.5288°
Volume (in tetrahedra): a³
Cubic Volume: a³√2/12
A Quanta Modules: 24
B Quanta Modules: 0
Surface area (in equilateral triangles): 4a²
Surface area (in squares) 4a²√3/4
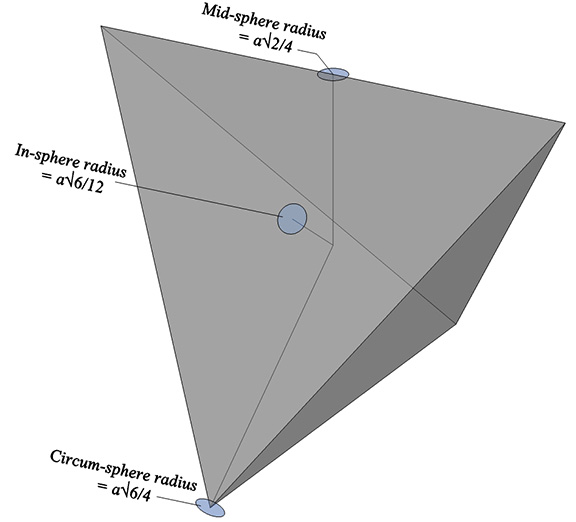
In-sphere radius (center to mid-face): a√6/12
Mid-sphere radius (center to mid-edge): a√2/4
Circumsphere radius (center to vertex): a√6/4
The surface, central, dihedral and other angles of the regular tetrahedron:
Surface, central, dihedral, and other angles of the regular tetrahedron
The in-sphere radius (center to mid-face), mid-sphere radius (center to mid-edge), and circumsphere radius (center to vertex) of the regular tetrahedron:
The in-sphere radius (a√6/2), mid-sphere radius (a√2/4), and circumsphere radius (a√6/4) of the regular tetrahedron
The regular tetrahedron has three natural poles, or axes, of spin, the three axes running between mid-edges.
The most natural pole, or axis of spin, of the regular tetrahedron runs from mid-edge to mid-edge.
The A quanta module is derived from the regular tetrahedron. Through symmetrical quartering and bisecting the regular tetrahedron is divided into 24 A quanta modules, 12 positive and 12 negative.
The regular tetrahedron defines and is constructed from 24 A Quanta Modules, 12 positive and 12 negative.
The regular tetrahedron can be constructed from a paper strip with three consecutive folds of arccos(-1/3), approximately 109.4712°.
The regular tetrahedron may be unfolded to, and refolded sequentially from, a single paper strip.
Spheres close pack as tetrahedra in even-numbered layers around octahedra (spaces) and VEs (spheres). In odd-numbered layers, the spheres surround a positive or negative tetrahedron (concave octahedron interstice). The growth pattern repeats every fourth layer, with the first layer surrounding a positive tetrahedron (concave octahedron interstice); the second layer surrounding an octahedron (concave VE space); the third layer surrounding a negative tetrahedron (concave octahedron interstice); and the fourth layer surrounding a VE (sphere).
Spheres close pack as tetrahedra in a pattern that repeats every four layers. Their relative position in the isotropic vector matrix is defined by what’s at their centers: a positive or negative tetrahedron (concave octahedron interstice); an octahedron (concave VE space); or VE (sphere).
Number of spheres in outer layer: 2F²+2 F = edge frequency, i.e., number of subdivisions per edge
Total number of spheres: [(N+1)³-(N+1)]/6 N = number of spheres per edge
A single sphere is free to rotate in any direction. Two tangent spheres are free to rotate in any direction but must do so cooperatively. Three spheres can rotate cooperatively about a single axis, i.e., they may involute and evolute along an axis perpendicular to the line connecting them with the center of the group. The addition of a fourth sphere acts as a lock, preventing all from rotating independently of the others. No rotation is possible, making the minimum stable closest-packed-sphere system: the tetrahedron.
Four spheres constitute the minimum self-stabilizing structural system, the tetrahedron.
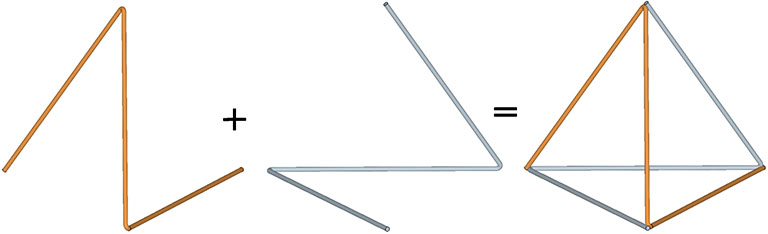
Two triangular helical units combine to form one 4-sided tetrahedron. 1+1 = 4. Fuller would use this as a primary example of synergy and complementation. The two additional triangles were always there but invisible until the first two were combined into a system.
1+1=4. Two open triangles combine to form the four triangles of the tetrahedron.
The tetrahedron in its tensor-equilibrium phase has the overall shape of the Jessen orthogonal icosahedron. This 6-strut tensegrity is uniquely ambidextrous, i.e., neither right- nor left-handed; the vertex loops may be pulled inward to generate either a positive or a negative tetrahedron.
All structure is fundamentally reducible to tensegrity and this applies to the tetrahedron, show here transforming from its tensor-equilibrium phase into its polyhedral phase, alternating between positive and negative tetrahedra.
In the interstitial model of the isotropic vector matrix, the interstices occupy the positions defined by tetrahedra in the vector model, and by cubes in the quanta model. The interstices, i.e. the space between spheres close-packed as tetrahedra, describe a concave octahedron. (See Spheres and Spaces.)
Four spheres close-packed as tetrahedra disclose concave octahedra interstices at their common center.
This concave octahedron and its enclosing tetrahedron retain their shape and position throughout the jitterbug transformation. Only their orientation changes, with the tetrahedron rotating 90° between phases. See: The Jitterbug.
In any omni-triangulated structural system, that is, for any polyhedron structurally stabilized through triangulation:
the number of vertices (“crossings” or “points”) is always evenly divisible by two;
the number of faces (“areas” or “openings”) is always evenly divisible by four, and;
the number of edges (“lines,” “vectors,” or “trajectories”) is always evenly divisible by six.
This holds true for any polyhedron of whatever its size or complexity, just so long as its faces (areas, openings) are all triangulated and therefore constitute a “structure” by Fuller’s definition, i.e. any system that holds its shape without external support. The point here is that the same numbers, two, four, and six, fundamentally describe the tetrahedron:
The number of (non-polar) vertices in a tetrahedron is two;
The number of faces (“areas” or “openings”) in a tetrahedron is four, and;
The number of edges (“lines”, “vectors”, or “trajectories”) in a tetrahedron is six.
“When four tetrahedra of a given size are symmetrically intercombined by single bonding, each tetrahedron will have one of its four vertexes uncombined, and three combined with the six mutually combined vertexes symmetrically embracing to define an octahedron; while the four noncombined vertexes of the tetrahedra will define a tetrahedron twice the edge length of the four tetrahedra of given size; wherefore the resulting central space of the double-size tetrahedron is an octahedron. Together, these polyhedra comprise a common octahedron-tetrahedron system.” —R. Buckminster Fuller, Synergetics, 422.03
Nature’s simplest structural system is the tetrahedron. Regular tetrahedra, however, do not combine to fill all-space (as do cubes, for example). In order to fill all-space, the regular tetrahedron must be complemented by the regular octahedron. Together they produce what Fuller conceived as the simplest, most powerful structural system in the universe, the octahedron-tetrahedron system, which he was able to patent in 1961 and subsequently copyright under the trademark name, the “octet truss.”
If we stack six octahedra edge-to-edge to create a larger octahedron we discover that we have inadvertently produced eight tetrahedra at its center. The eight edge-bonded tetrahedra share a common vertex and form the vector equilibrium (VE).
Stacking octahedron, edge-to-edge to form a larger octahedron inadvertently produces eight tetrahedra at its center. The eight tetrahedra share a common center and form the VE.
Another name for this system of all-space-filling tetrahedra and octahedra is the isotropic vector matrix.
One of the simplest ways to construct the octahedron is to orient three squares to the three planes of the Cartesian grid, centered on the origin and turned so that each of their vertices lie on the axes.
The octahedron constructed from three equatorial squares intersecting symmetrically at 90°.
The surface, central, dihedral, and other interior and exterior angles of the regular octahedron.
Surface and interior angles of the regular octahedron
The in-sphere (center to mid-face), mid-sphere (center to mid-edge), and circumsphere (center to vertex) radii of the octahedron.
In-sphere, mid-sphere and circumsphere radii of the regular octahedron
The regular octahedron consists of 96 quanta modules, evenly distributed between A and B modules with 48 each.
Quanta module construction of the regular octahedron
The regular octahedron can be constructed from a single paper strip along seven consecutive folds of atan(2√2), or approximately 70.5288°, each. See also: Polyhedra From Polygonal Strips.
The regular octahedron can be constructed from a single paper strip with seven consecutive folds of atan(2√2).
The octahedron may be produced through the unfolding of one positive and one negative tetrahedron.
The octahedron produced by the unfolding of one positive and one negative tetrahedron.
The octahedron can also be produced from one positive or one negative tetrahedron alone. This produces an octahedron of four triangular facets and four empty triangular windows. This can be demonstrated through a kind of jitterbug transformation, as shown in the figure below.
Jitterbug-like oscillation between the regular tetrahedron and octahedron.
Spheres close-pack as octahedra around a central sphere or nucleus in even numbered layers only. The odd numbered layers surround a space, or concave vector equilibrium (VE).
Spheres close pack as octahedra around a central sphere in even-numbered layers. Odd-numbered layers surround a space (concave VE).
Number of spheres in outer shell: 4F²+2 F = edge frequency, i.e., the number of subdivisions per edge
Total number of spheres: (4N³+2N)/6 N = number of spheres per edge
The tensor equilibrium phase of the octahedron suggests the overall shape of the VE, with its six vertex loops forming the square “faces” of the VE. As with all polyhedra, with the exception of the tetrahedron (see: The Dual Nature of the Tetrahedron), the vertex loops are oriented in either a clockwise or a counter-clockwise direction, and when pulled in tight form the six vertices of either the positive or the negative octahedron. (See also: Tensegrity.)
All structure is fundamentally reducible to tensegrity, and this includes the octahedron, shown here transforming between its tensor-equilibrium and polyhedral phases.
In the interstitial model of the isotropic vector matrix, the spaces between spheres occupy the positions defined by the octahedra in the vector model, and by one of the two rhombic dodecahedra in the quanta model. The spaces, i.e., the space between spheres close-packed as octahedra, describe a concave VE.
Six spheres close-packed as octahedra reveal a concave VE space at their common center.
All the structural (i.e. triangulated) polyhedra may be constructed from an even number triangular helices, or what Fuller called one half of a structural quantum. The tetrahedron and icosahedron require an equal number of clockwise and counter-clockwise helices. However, the octahedron is curiously constructed from an even number of clockwise, or an even number of counter-clockwise triangular helices, which seems to contradict our intuitive concept of structure as a knot of positive and negative forces.
This underscores, I think, our understanding of the octahedron as the space between the spheres, and the void between the tetrahedra, of the isotropic vector matrix.
The octahedron is constructed from an even number of clockwise or counter-clockwise triangular helices, unlike the tetrahedron and icosahedron which are constructed from an even number of both.
Note further that the endpoints of the helices converge on just two of the octahedron’s six vertices, resulting in a preferred axis of spin, and of wave propagation (see Isotropic Vector Matrix as Transverse Waves.)
All … regular, omnisymmetric, uniform-edged, -angled, and -faceted, as well as several semisymmetric, and all other asymmetric polyhedra other than the icosahedron and the pentagonal dodecahedron, are described repetitiously by compounding rational fraction elements of the tetrahedron and octahedron. These elements are known in synergetics as the A and B Quanta Modules. —R. Buckminster Fuller, Synergetics, Section 910.11
The pentagonal dodecahedron (or “regular dodecahedron in conventional geometry) is the double of the regular icosahedron; the 12 vertices of the regular icosahedron can be truncated to form the 12 faces of the pentagonal dodecahedron, and the 20 vertices of the pentagonal dodecahedron can be truncated to form the 20 faces of the regular icosahedron. (See: Icosahedron.)
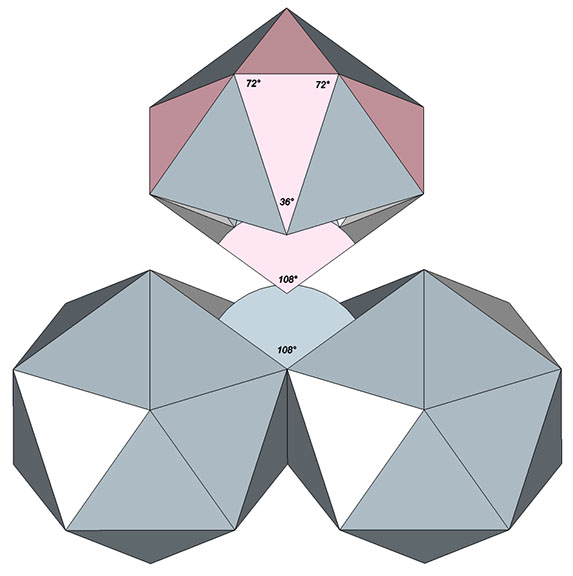
But I think a more interesting symmetry is with the counterpart to the regular icosahedron that occurs in the jitterbug transformation of the isotropic vector matrix (see Icosahedron Phases of the Jitterbug). The counterpart to the regular icosahedron can be constructed from the pentagonal dodecahedron by truncating 8 of its 20 vertices along triangles formed by joining the vertex’s three face diagonals.
The space filling complement to the regular icosahedron (pink-white) constructed by truncations of the pentagonal dodecahedron.
Otherwise, the pentagonal dodecahedron does not appear in Fuller’s geometry. Like the icosahedron, it is incommensurate with the isotropic vector matrix and its volume is irrational whether measured in cubes or in tetrahedra.
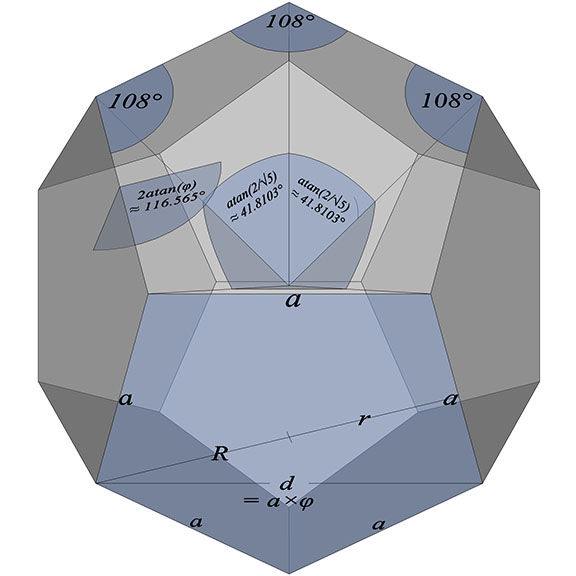
The pentagonal, or “regular,” dodecahedron with edge length, a, has the following dimensions when expressed in terms of the golden ratio (φ):
Volume (cubic, unit edge length (a): a³×5φ³/(5-√5)
Volume (tetrahedral, unit edge length (a): a³×φ³×30√2/(5-√5)
Volume (cubic, unit diagonal (d): d³×(φ+2)/2
Volume (tetrahedral, unit diagonal (d): d³×3√2(φ+2)
Quanta modules: n/a
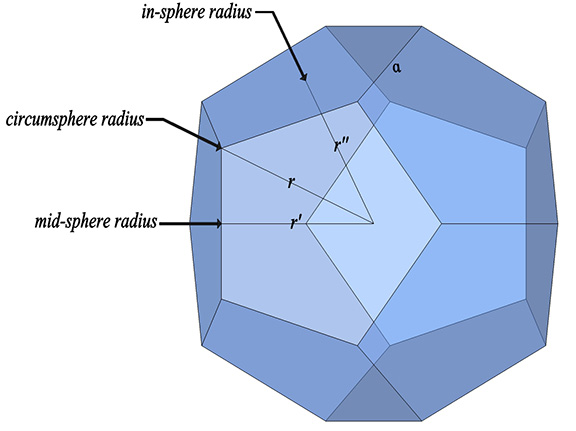
Pentagonal Dodecahedron with edges (a), diagonals (d), in-radius (r), circum-radius (R), surface, central, and dihedral angles indicated.
In-sphere, mid-sphere, and circumsphere radii of the pentagonal dodecahedron (φ = the golden ratio)
The volume of the pentagonal dodecahedron seems to be irrational regardless of which of its dimensions is taken as unity, and regardless of whether the volume is calculated in cubes or tetrahedra, as shown in the following table:
“Relationships Between First and Third Powers of F Correlated to Closest-Packed Triangular Number Progression and Closest-Packed Tetrahedral Number Progression, Modified Both Additively and Multiplicatively in Whole Rhythmically Occurring Increments of Zero, One, Two, Three, Four, Five, Six, Ten, and Twelve, All as Related to the Arithmetical and Geometrical Progressions, Respectively, of Triangularly and Tetrahedrally Closest-Packed Sphere Numbers and Their Successive Respective Volumetric Domains, All Correlated with the Respective Sphere Numbers and Overall Volumetric Domains of Progressively Embracing Concentric Shells of Vector Equilibria: Short Title: Concentric Sphere Shell Growth Rates.” —R. Buckminster Fuller, Synergetics, 971.01
The formulas for the close packing of spheres into clusters of triangles and tetrahedra follow the same sequential pattern as the number of unique pairings possible given a fixed number of objects. If N is the number of objects, the number of unique pairings is given by the formula, (N²-N)/2. The formula is the integral of the series (N-1)+(N-2)+(N-3)+…+(N-N), which represented graphically forms a triangle, with each element in the series forming a row of one less than the row below it. The formula for the total number of spheres comprising a triangle with n spheres along any one edge is (n²+n)/2. Because N in the previous formula equals n+1, we can rewrite the former as [(n+1)² – (n+1)]/2, and we can rewrite the latter as [(N-1)²-(N-1)]/2. In any case, if we stacked the results, they would form a tetrahedron. The formula for the total number of spheres comprising a tetrahedron with n spheres along any edge is [(n+1)³ + (n+1)]/6. This follows the pattern of the formula for the triangle, but the addition of ‘1’ follows the pattern of the formula for unique pairings.
Math sometimes hides rather than highlights patterns that would otherwise be obvious if we began with the geometric model. Spheres close pack as triangles and tetrahedra of frequency F, with F being the number of subdivisions of the edge vector. If we replaced n with F in the formulas for the close packing of spheres into triangles and tetrahedra, the formulas would be:
(F+2)²-(F+2)/2 = total spheres in triangle of frequency F (F+2)³-(F+2)/6 = total spheres in tetrahedron of frequency F.
Both follow the pattern of the formula for pairings, and the ‘+2’ is likely the same ‘+2’ we find in the sphere shell growth rate formulas:
2F²+2 = sphere shell growth rate tetrahedron; 4F²+2 = sphere shell growth rate of octahedron; 6F²+2 = sphere shell growth rate of cube;* 10F²+2 = sphere shell growth rate of VE; 12F²+2 = sphere shell growth rate of rhombic dodecahedron*.
*The shells of the cube and the rhombic dodecahedron are not close-packed.
Fuller attributes this “additive two” to the pole of spin, a property essential to the definition of any system. But when talking about an individual sphere, he attributes the “+2” to the sphere’s two surfaces—the convex exterior and the concave interior (see Anatomy of a Sphere). When F=0, the vector equilibrium (VE) consists of a single sphere, the nucleus. But the shell growth rate formula returns 10(0)²+2 = ‘2’. Fuller, however, does not discard this as a mathematical absurdity. The universe is finite, though unbounded, and the sphere, like all polyhedra, has both a concave inside, which contains a definite part of the finite universe, as well as convex outside, that contains an indefinite part of the finite universe. See The Multiplicative and Additive Two.
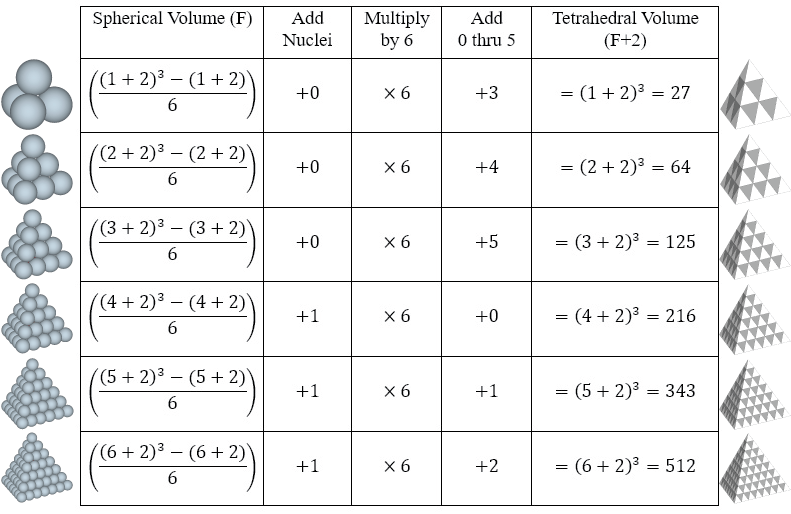
Fuller noticed a correlation between the tetrahedron’s spherical and tetrahedral volumes. By mathematically isolating the third power element in the formula for spheres, we observe a pattern that repeats in increments of 6, as disclosed in the following table:
By mathematically isolating the third-power element in the formula for the tetrahedron’s spherical volume, i.e. (F+2)³, we observe a six-part repeating pattern. Starting with with the spherical volume, and with each increase in frequency, F, we repeat the following steps: 1) Add the number of fully realized nuclei; 2) multiply by six, and then; 3) add the next number in the cycle 0, 1, 2, 3, 4, 5, 0, 1, 2, 3, etc. beginning with ‘3’ for F1.
Note further that the third-power element isolated from the spherical volume describes a tetrahedron with the same number of spaces as the number of spheres described by the original formula. For example, the spherical volume of the F1 tetrahedra in the left column of the above table is 4, and the number of spaces (i.e. octahedra) in the F2 tetrahedra in the right column is also 4. Remember that spheres and spaces exchange places in the oscillations of the isotropic vector matrix. (See also: Jitterbug, and Spheres and Spaces.)
I’m not convinced, however, that the first additive modifier (the second column of the table) is attributable to the number of nuclei. New nuclei emerge with every fourth layer, not every sixth, so Fuller may have either been mistaken, or he had a different understanding of what qualifies as a nucleus in tetrahedral clusters. Nor am I convinced of the significance that Fuller drew from the ratio between the 6 multiplier and the additive 0–5; The ratio of 6:5 is the same as 144:120, the volume of the spherical domain (there are 144 quanta modules in the rhombic dodecahedron), and the Basic Disequilibrium LCD Triangle (which divides the icosahedron by 120). Further, I do I see the 12:10 correlation that Fuller claimed existed between the volume of the outer shell in tetrahedra (see below), and the number of spheres in the outer layer of the VE (10F²+2). That’s not to say there isn’t one.
The formula for the tetrahedral volume of the VE is 20F³. We can isolate the shell volume by subtracting the volume of its interior VE, i.e., the VE of frequency (F-1): 20F³ – 20(F-1)³. The formula works out to be the following:
10(6F²-6F+2) = volume of outer shell (in tetrahedra) of VE of frequency F
which can be rewritten as: 10×[2+(12(F²-F)/2)].
Again, we have the same pattern, (F²-F)/2, seen in the formula for unique pairings. We also have the same ‘+2’ seen in the sphere shell growth rate formulas above. Further investigation would no doubt reveal other interesting patterns and correlations between the close packing of spheres and space-filling polyhedra.
The golden ratio appears nowhere in Fuller’s two-volume exposition of his geometry, Synergetics. This isn’t surprising; Fuller eschewed irrational numbers, and his mathematical explorations persuaded him that all irrational numbers, like the golden ratio, could be expunged from our science if only we adopted his physical geometry, grounded in the real and experimentally verifiable rather than the axiomatic. But the golden ratio turns up again and again in both his and in conventional geometry, and recognizing it when you see it might lead to discoveries otherwise overlooked.
Expressed algebraically, the golden ratio (φ) is:
a+b/a = a/b = φ = (1+√5)/2 ≈ 1.618034
from which we can deduce the following selection of algebraic identities:
φ² = φ + 1
1/φ = φ – 1
1/φ² = 2 – φ
φ + φ² = φ³
1/φ – 1/φ² = 1/φ³
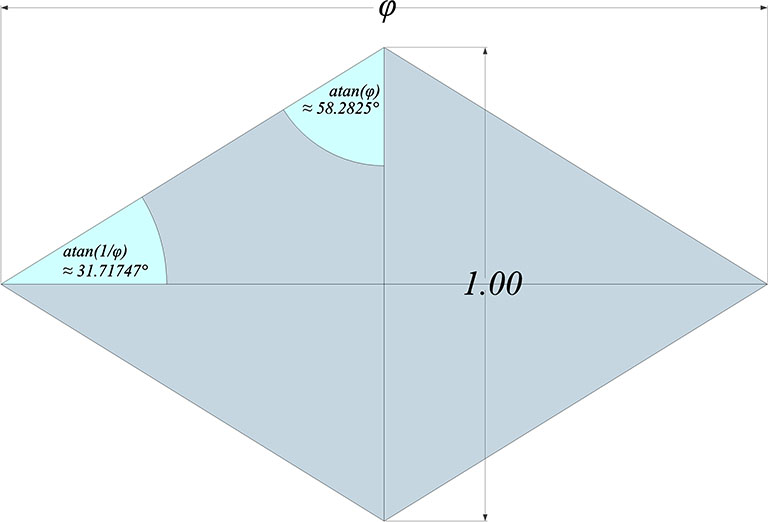
Expressed in trigonometry, the golden ratio has the following identities:
The visual geometric expressions of the golden ratio (φ) are numerous. Here is a selection in two dimensions:
Examples of the golden ratio and its geometrical expression in two dimensions.
The golden ratio turns up in many polyhedra, both regular and irregular.
Icosahedron
The icosahedron is perhaps the most famous example of the golden ratio in three dimensions. It can be constructed from three golden rectangles intersecting at 90° around a common center, as shown in the following illustration:
The regular icosahedron and its relation to the Golden Ratio.
Regular (Pentagonal) Dodecahedron
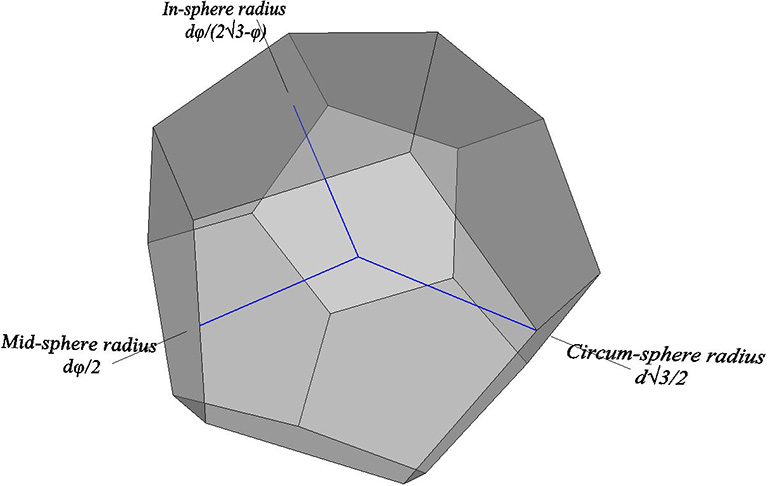
Wherever pentagons are found, the golden ratio is sure to turn up. The in-sphere, mid-sphere and circumsphere radii of the pentagonal dodecahedron are all related to the golden ratio.
a = edge length φ = (√5+1)/2
The in-sphere radius (center to mid-face) = a × φ²/2√(3-φ) The mid-sphere radius (center to mid-edge) = a × φ²/2 The circumsphere radius (center to vertex) = a × √3φ/2
Pentagonal dodecahedron showing the circumsphere radius (r), the mid-sphere radius (r’), and the in-sphere radius (r”).
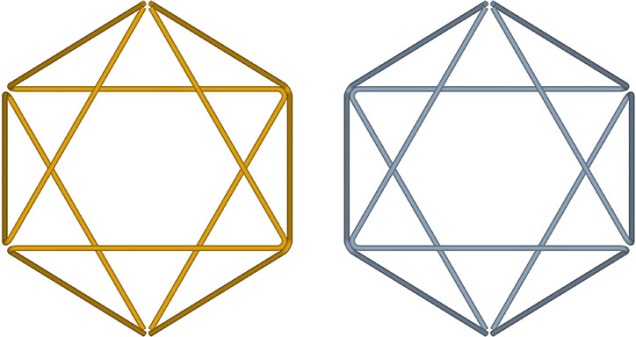
Rhombic Triacontahedron
The 30 faces of the the rhombic triacontahedron are identical with the golden rhombus.
The 30 faces of the rhombic triacontahedron are all golden rhombuses.
The long diagonal of the golden rhombus is φ times the length of its short diagonal.
“Starting With Parts: The Nonradial Line: Since humanity started with parallel lines, planes, and cubes, it also adopted the edge line of the square and cube as the prime unit of mensuration. This inaugurated geomathematical exploration and analysis with a part of the whole, in contradistinction to synergetics’ inauguration of exploration and analysis with total Universe, within which it discovers whole conceptual systems, within which it identifies subentities always dealing with experimentally discovered and experimentally verifiable information. Though life started with whole Universe, humans happened to pick one part, the line, which was so short a section of Earth arc (and the Earth’s diameter so relatively great) that they assumed the Earth-scratched-surface line to be straight. The particular line of geometrical reference humans picked happened not to be the line of most economical interattractive integrity. It was neither the radial line of radiation nor the radial line of gravity of spherical Earth. From this nonradial line of nature’s event field, humans developed their formulas for calculating areas and volumes of the circle and the sphere only in relation to the cube-edge lines, developing empirically the “transcendentally irrational,” ergo incommensurable, number pi (π ), 3.14159 . . . ad infinitum, which provided practically tolerable approximations of the dimensions of circles and spheres.” —R. Buckminster Fuller, Synergetics, 982.20
It would seem that conventional 90° geometry has the advantage over Fuller’s 60° geometry in that the area of the circle in squares is stated simply as πr², while its area in equilateral triangles is the more cumbersome π4r²√3/3. But remember that the r in the equation is the circumradius of a very high frequency polygon, and not the midradius assumed by pi.
The simplicity of the formula in 90° geometry is due to the coincidence that the midradius of the unit square is identical with the square’s edges. In fact, this may be why we ended up with a 90° geometry in the first place, and not, as Fuller believed, because we thought the Earth was flat.
The same is true for volumes. The mid-sphere radius of the unit cube is identical with its edges and leads to the relatively simple formula, 4/3 × πr³, as opposed to its 60° equivalent, 6√2 × πr³.
Conversion Factors and Power Constants
The difference between the midradius and the triangle’s edge accounts for the multiple of 2√3/3 for heights and radii in the 60° formula for areas. The difference between the mid-sphere radius and the tetrahedron’s edge accounts for the multiple of √6/2 for heights and radii in the 60° formula for volumes. See: Areas and Volumes in Triangles and Tetrahedra.
If we divide the 60° area of the circle (in triangles) by its 90° area (in squares), we get my 60° conversion factor for areas, 4√3/3. And if we divide the 60° volume of the sphere (in tetrahedra) by its 90° volume (in cubes), we get my 60° conversion factor for volumes, 6√2. These conversion factors are simply the inverses of the conventional area (in squares) and volume (in cubes) of the equilateral triangle and the regular tetrahedron. The area (in squares) of an equilateral triangle of unit edge length is: 1/2 × base × height = 1/2 × √3/2 = √3/4, and the inverse of √3/4 is 4/√3, or 4√3/3.
Area (in equilateral triangles) = Area (in squares) × 4√3/3 ≈ 2.30940108
The cubic volume of the regular tetrahedron of unit edge length is: 1/3 × base × height = 1/3 × √3/4 × √6/3 = √2/12, and the inverse of √2/12 is 12/√2 = 6√2.
Volume (in regular tetrahedra) = Volume (in cubes) × 6√2 ≈ 8.48528137
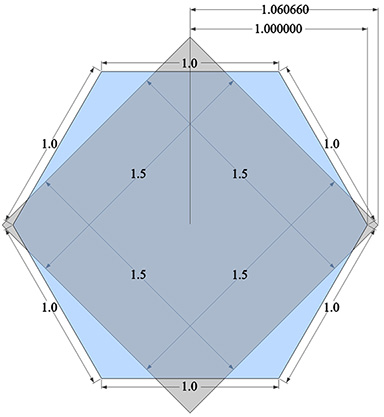
“Synergetics has discovered that the vectorially most economical control line of nature is in the diagonal of the cube’s face and not in its edge. […] The isotropic-vector-matrix’s field-occurring-cube’s diagonal edge has the value of 2, being the line interconnecting the centers of the two spheres. […] The square root of 2 = 1.414214, ergo, the length of each of the cube’s edges is 1.414214. […] Therefore, the cube occurring in nature with the isotropic vector matrix, when conventionally calculated, has a volume of 2.828428. […] This same cube in the relative-energy volume hierarchy of synergetics has a volume of 3, [and] 3 ÷ 2.828428 = 1.06066. To correct 2.828428 to read 3, we multiply 2.828428 by the synergetics conversion constant 1.06066.” —R.Buckminster Fuller, Synergetics, 982.21-46 (condensed)
The first appearance of Fuller’s synergetics power constants is in a paper he published in 1950 called the Dymaxion Hierarchy of Vector Generated Field-, Volume-, Mass-, Charge-Potential of Geometric Forms. It was Fuller’s first exposition of his “Dynamic Energetic Geometry,” later to be renamed Synergetics. The paper was republished, without modification, as Table 963.10, in Synergetics I. It includes the first mention of the “A particle,” which will become his A quanta module, and the “Dymaxion,” which will become his vector equilibrium (VE). It is also the first mention of his discovery for the rational volumes of the cube, octahedron, rhombic dodecahedron, VE, and Kelvin’s truncated octahedron.
The synergetics power constants and their applications can be confusing and require, I think, some explanation. What Fuller would later call his synergetics conversion constant is referenced in Table 963.10 as a mathematical derivation of the dymaxion vector constant, or “V”. The synergetics conversion constant is the factor he uses to convert conventional (or cubic) volumes to their “energetic” volumes, while the dymaxion vector constant is two times its third root. In other words, the dymaxion vector constant is 2 times the 1st power synergetics constant which is multiplied by itself to produce the synergetics power constants for the 2nd, 3rd, and higher dimensions.
The synergetics power constants are:
1st power constant: ⁶√(9/8) ≈ 1.019824451328 2nd power constant: ³√(9/8) ≈ 1.040041911526 3rd power constant: √(9/8) ≈ 1.060660171780 4th power constant: ³√((9/8)²) ≈ 1.081687177731 5th power constant: ⁶√((9/8)⁵) ≈ 1.103131032537 6th power constant: 9/8 = 1.125 9th power constant: ²√((9/8)³) ≈ 1.193242693252 12th power constant: (9/8)² = 1.265625
Fuller’s synergetics conversion constant for volumes is the third power constant, arrived at by dividing the vector-diagonal cube’s “energetic” volume of 3 by its conventionally calculated cubic volume of 2√2.
The cube’s energetic volume is 3, a number familiar to readers as the tetrahedral volume of the unit-diagonal cube. But this is inconsistent with the cubic volume in the denominator, which assumes a diagonal twice the length. Careful reading, however, shows that the cube’s “energetic” volume, is not the tetrahedral volume of a unit diagonal cube but, rather, the cubic volume of a cube whose diagonal length is “V,” i.e., two times the 1st power constant.
The “energetic” volume of the cube in the numerator of his synergetics conversion constant is the cubic volume calculated with a diagonal length of V, while the conventional volume of the cube in the denominator is the cubic volume calculated with a diagonal length of 2. The “energetic” volume (in cubes) is numerically identical with the tetrahedral volume (in tetrahedra) of a unit-diagonal cube.
Note: In Fuller’s geometry, the edges of polyhedra (or, sometimes, their diagonals) are vectors connecting sphere centers. If the radius of those spheres is taken to be unity, the vectors connecting the sphere centers must have a length two times their radius, or ‘2’. This explains why his conventionally-calculated volume of the vector-diagonal cube assumes the edges to be of length √2 rather than √2/2. On the other hand, the conversion constant I calculated above (6√2) assumes a vector length of 1. Fuller’s insistence on doubling the edge length in his cubic calculations has merit. After all, conventional geometry already assumes a vector length of 2 when it assigns a radius length of 1 to its prime sphere. It is why the circumference of the circle is 2πr rather than πd, and why cyclical unity (360°) is 2π radians.
Fuller’s primary aim with his synergetics power constants was to resolve all of the mathematical and physical constants (pi, Planck’s constant, etc.) into whole numbers or simple fractions aligned with the rational 60° coordinate system of the isotropic vector matrix. But he left it to others to work out the details. His own attempts were either flawed or unpersuasive. He proposed a whole number value for Planck’s constant (20), and at one point believed he’d succeeded in finding a rational volume for the sphere (5). He later retracted this claim, writing, “My hindsight wisdom tells me that my subconscious demon latched tightly onto this 5 and fended off all subconsciously challenging intuitions.” The “5” that his subconscious demon had latched onto is almost (but not precisely) the cubic volume of the sphere multiplied by his synergetics conversion constant raised to the 3rd power: cubic volume of sphere × (synergetics conversion constant)³ = 4π/3 × (3√2/4)³ ≈ 4.9983. He later realizes he had raised to the third power what was already his third power constant, thereby inadvertently calculating the “energetic” volume of the sphere using the 9th power constant. Had he used the 3rd power constant, the result would have been 4π/3 × 3√2/4 ≈ 4.4429—a number sufficiently distant from 5 so as not be mistaken for a rounding error due to the lack of “absolute resolvability of trigonometric calculations.” The rational value of 20 which he proposed for the Planck constant is based on the observation that its base value of 6.626070 approximates the ratio of the tetrahedral volumes of the VE and the cube.
Volume of VE ÷ Volume of Cube = 20/3 = 6.666…
The difference between 6.626070 and 6.666666 was, he believed, due entirely to our clumsy system of measurement and the units employed, a dubious claim that has mostly been ignored.
In his calculations for the cubic volume of the sphere, Fuller assumes a radius of 1, i.e. half the sphere’s diameter which has a vector length of 2. If we were instead to use my conversion constant for volumes, 6√2, rather than Fuller’s, we would need to calculate the sphere’s cubic volume using a radius of 1/2:
4π/3 × (1/2)³ × 6√2 = π√2 ≈ 4.4429
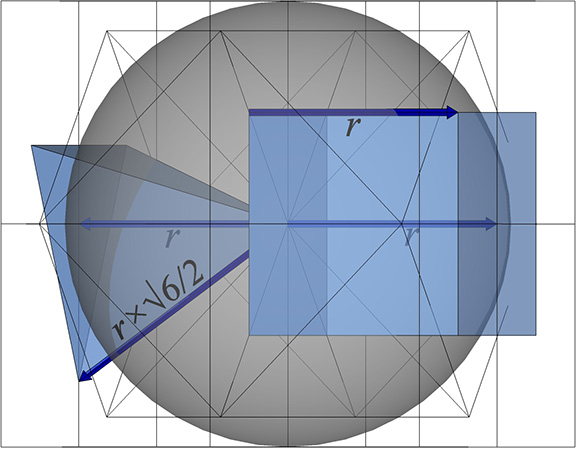
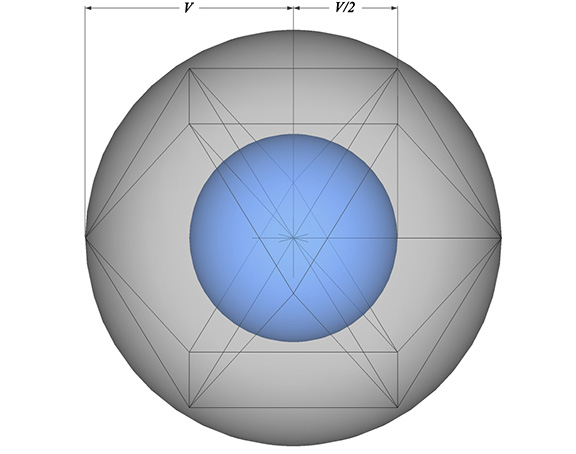
We can calculate the “energetic” (or tetrahedral) volumes of the sphere directly using Fuller’s dymaxion vector constant, V. In the figure below, the energetic volume of the blue nuclear sphere is 4/3 × π(V/2)³ = πV³/6 ≈ 4.442883. The circumsphere of the VE, the gray sphere in the figure below, has an energetic volume of 4πV³/3 ≈ 35.543064.
The “energetic” volume of the nuclear sphere (blue) = πV³/6 ≈ 4.442883. The “energetic” volume of its circumsphere (gray) = 4πV³/3 ≈ 35.543064.
The 3rd root of my conversion constant for volumes, i.e., ³(6√2), is identical with Fuller’s dymaxion vector constant, V. That is, 2 × ⁶√(9/8) = ³√(6√2). In section 985.02 of Synergetics I, Fuller briefly mentions the conversion constant for areas I calculated above, 4√3/3, and applies it to the square area of unit circle, but he does not relate it to his other power constants. If we take the 2nd root of my conversion constant for areas, i.e. √(4√3/2), and apply it as the unit vector for calculations of area, the equilateral triangle has a square area of 1, the hexagon has a square area of 6, etc.
Some Coincidences and Curiosities
There may be more to Fuller’s, and my own, power constants, and I’ll circle back to this topic as fresh insights emerge. If science is to make the transition from the 90° to the 60° system of measurement and geometric modelling, the power constants, or some version of them, would seem to be relevant to the process. For now, the following coincidences and curiosities may lead me somewhere, or they may be mathematically trivial.
If we apply my 2nd power conversion constant for areas to the edge of an equilateral triangle, its area (in squares) is numerically identical to its edge value.
Fuller’s 3rd power constant is equal to the ratio of my conversion factors for heights and radii in two and three dimensions:
√6/2 ÷ 2√3/3 = 3√2/4 ≈ 1.060660172
The dymaxion vector constant (V) raised to the third power is equal to my conversion constant for volumes, 6√2, just as the third root of my conversion constant for volumes in identical with V.
V³ = 6√2 ≈ 8.485281374
My conversion constant for volumes, 6√2, is eight times the synergetics conversion constant:
6√2 ÷ 8 = 3√2/4 ≈ 1.060660172
A square with a perimeter of 6 has a radius equal to the synergetics conversion constant.
The 3rd-power synergetics conversion constant is equal to the radius of perimeter-6 square.
The dymaxion vector constant (V) raised to the second power is equal to the third root of 72.
V² = 2×(³√9) = ³√72 ≈ 4.1601676461
It may be only a coincidence that the prime cube consists of exactly 72 quanta modules.
A rhombic dodecahedron with a short diagonal length of √6/2—my conversion factor for heights and radii in three dimensions—has an edge length of 3√2/4, the synergetics conversion constant.
Calculating areas and volumes in units of equilateral triangles and regular tetrahedra generally produces more rational results than calculating in units of squares and cubes. See Polyhedra With Whole Number Volumes.
The volume of a regular tetrahedron is conventionally calculated as the base times the perpendicular height divided by three. In the conventional Cartesian (90°) system of measurement, both the area of the triangular base and the volume of the tetrahedron are irrational numbers. Given an edge length of a, the height of the triangle is a√3/2, and the height of the tetrahedron is a√6/2. So,
Base of regular tetrahedron (in squares) = 1/2 × a × a√3/2, or a²√3/4, and Volume of regular tetrahedron (in cubes) = 1/3 × a√3/2 × a√6/3, or a³√6/2
In Fuller’s 60° system of measurement, the area of the base triangle is simply a², and the volume of the tetrahedron is a³, the same formulas conventionally used for squares and cubes. In the 60° system, the tetrahedron is the unit by which volume is measured, and the equilateral triangle is the unit by which surface area is measured.
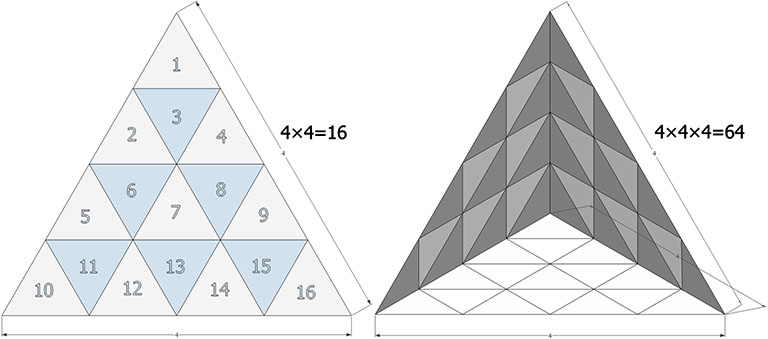
For example, an equilateral triangle of edge length 4 has an area of 16, or 4×4 smaller triangles. And a regular tetrahedron of edge length 4 has a volume of 64, or 4×4×4 tetrahedra.
60° accounting works just like 90° accounting; the 2nd power of the triangle’s edge length gives its area, and the 3rd power of the tetrahedron’s edge length gives its volume.
Note that you cannot stack tetrahedra to fill all-space. The large tetrahedron in the above illustration isn’t built of 64 smaller tetrahedra. It is built of a combination of twenty four tetrahedra and ten octahedra. Fortunately, the volume of one octahedron is precisely the same as four tetrahedra. 24 + (10×4) = 64.
Subdividing the tetrahedron produces layers of vertex-bonded tetrahedra face-bonded to edge-bonded octahedra. It can be demonstrated operationally that the regular octahedron has a volume of precisely four regular tetrahedra.
To determine the area of a given polygon or the volume of a given polyhedron, we can calculate the area and volume using conventional methods, and then use a conversion factor to find the equivalent area in equilateral triangles or the equivalent volume in tetrahedra. See General Unit Conversions.
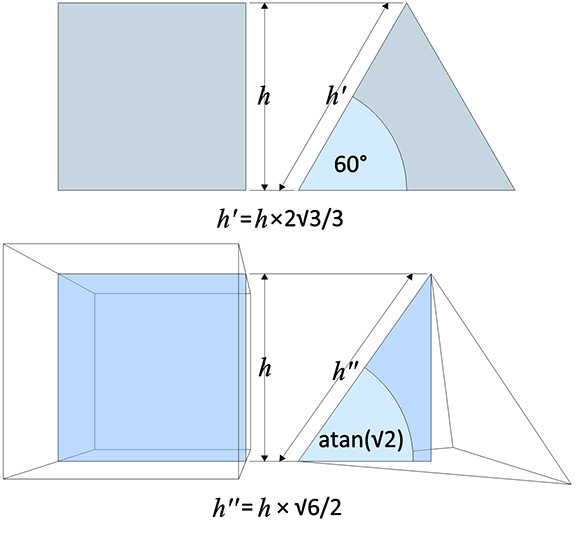
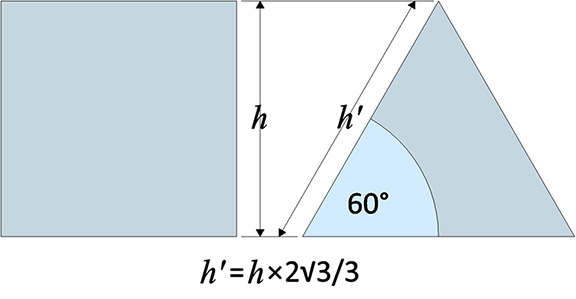
Alternatively, we can measure areas and volumes directly, remembering only that the heights differ between the two systems. In conventional geometry, both in plane geometry and in solid geometry, the height is measured at 90° to the base. In 60° geometry, the two-dimensional height is measured at 30° from the perpendicular or 60° from the horizontal base, and the three-dimensional height is measured at arctan(√2/2) from the perpendicular or arctan(√2) from the horizontal base. These are the angles that the edges of the equilateral triangle and tetrahedron make with their respective bases.
In 90° geometry, height (h) is always measured at 90° from the horizontal. In 60° geometry, height in two dimensions (h’) is measured at 60° from the horizontal: h’=h×2√3/3. Height in three dimensions (h”) is measured at arctan(√2) from the horizontal: h”=h×√6/2.
The area for any rhombus (quadrilateral, rectangle, or square) is 2 × base × height, where height is measured at 30° from vertical. Where base = a and the vertical height = h, the formula is:
Triangular area of any rhombus = 2 × a × h2√3/3
Likewise, the area for any triangle is base × height, or, where base = a and h is the vertical height, the formula is:
Triangular area of any triangle = a × h2√3/3
The area for any polygon, regular or irregular, may be calculated by dividing it into rhombuses and/or triangles, calculating the areas of each, and then summing the results. See Calculating Areas of Regular Polygons. The areas of regular polyhedra may be calculated directly from the number sides and the length of its radius. See Calculating Volumes of Regular Polyhedra.
The volume of any polyhedron, regular or irregular, may be calculated by dividing it into cylinders and cones. By cylinders and cones, we mean all cylindrical or conical objects regardless of the shape of their bases. Where h is the perpendicular height…
Tetrahedral volume of a cone = area of base × h × √6/2 Tetrahedron volume of a cylinder = 3 × base × h × √6/2
Examples
Cone with triangular base (Tetrahedron)
This example serves as a proof of the proposition that the volume (in unit tetrahedra) of any regular tetrahedron can be expressed as [edge length]³.
a = edge length h = height = a√6/3 base (in equilateral triangles) = a²
Volume (in tetrahedra) = base × h√6/2 = a² × (a√6/3 × √6/2) = a³
Cone with Square Base (Half Octahedron)
This example serves as a proof of the proposition that the volume (in unit tetrahedra) of any regular half octahedron can be expressed as 2×[edge length]³.
a = edge length h = height = a√2/2 base (in equilateral triangles) = a²4√3/3
Volume (in tetrahedra) = base (in equilateral triangles) × h√6/2 = a²4√3/3 × (a√2/2 × √6/2) = 2a³
Cylinder with Square Base (Cube)
This example serves as a proof of the proposition that the volume (in unit tetrahedra) of any cube can be expressed as 3×[length of face diagonal]³.
a = edge length h = a d = diagonal = a√2 a = d√2/2 h = d√2/2 base (in equilateral triangles) = 2a×h×2√3/3 = 2(d√2/2)²×2√3/3 = 2d²√3/3
Volume (in tetrahedra) = 3×base (in equilateral triangles)×h = 3×2d²√3/3×(d√2/2×√6/2) = 3d³
When calculating volumes in units of tetrahedra, what would otherwise be perpendicular measurements are instead measured at an angle of atan(√2) from the horizontal. This angle corresponds to the angle the edges of the regular tetrahedron make with their base. Multiplying the perpendicular value, h, by √6/2 gives h’. See Areas and Volumes in Triangles and Tetrahedra.
Polyhedra can be divided up into cones whose bases correspond to the polyhedron’s faces and whose apexes all meet at the polyhedron’s center. This procedure gives the precise volume and, if done correctly, will produce the shorthand formulas that work for all similar polyhedra, as in the following:
The procedures by which the volume formulas are established for these and other polyhedra are demonstrated below. The areas of the faces will mostly be given without showing the work. To learn how each is calculated, see Calculating the Triangular Areas of Regular Polygons.
If the cubic volume of a given polyhedron is known, you can also use a conversion factor to quickly find the equivalent volume in tetrahedra. See General Unit Conversions.
General Volume Formula for all Polyhedra
Given the following parameters:
n = number of faces; n′ = number of alternate faces (if more than one); r = in-sphere radius connecting center to its perpendicular with the face; r′ = in-sphere radius connecting center to alternate faces (if more than one); a = edge length; face = area of face (in equilateral triangles); face′ = area of alternate faces (if more than one),
the general formula for the volume of any polyhedron in cubes is
(n/3)×face (in squares)×r (+ (n’/3)×face′ (in squares)×r′…)
and the general formula for the volume of any polyhedron in regular tetrahedra is
n×face (in triangles)×r√6/2 (+ n′×face′ (in triangles)×r′√6/2…)
Examples
Volume of Tetrahedron = a³
n = 4 a = edge length r = a√6/12 face (in squares) = a²√3/4 face (in equilateral triangles) = a²
Volume (in cubes) = n/3×face×r = 4/3×a²√3/4 × a√6/12 = a³/6√2 Volume (in tetrahedra) = n×face×r√6/2 = 4×a²×(a√6/12×√6/2) = a³
Note: The tetrahedron is more sensibly treated as a single cone with a triangular base, in which case the formula becomes:
Volume (in tetrahedra) = base × height × √6/2 = a² × a√6/3 × √6/2 = a³
Volume of Cube (unit diagonal) = 3d³
n = 6 a = edge length r = a/2 d = diagonal = a√2 a = d√2/2 r = d√2/4 face (in squares) = a² = (d√2/2)² = d²/2 face (in triangles) = 2d²√3/3
Volume (in cubes) = n×face×r = 6×d²/2×d√2/2 = d³√2/4 Volume (in triangles) = n×face×r√6/2 = 6×2d²√3/3×(d√2/4×√6/2) = 3d³
Note: The cube is more sensibly treated as a cylinder with a square base, in which case the formula becomes:
φ = golden ratio = (1+√5)/2 n = 20 a = edge length r = a(√3/12)(3+√5) = aφ²√3/6 d = mid-sphere diameter = a × φ face (in squares) = a²√3/4 face (in triangles) = a²
Note: Alternately, the tetrahedral volume of the regular icosahedron may be calculated using the edge-to-edge (mid-sphere) diameter, d, or the long edge of golden rectangle used in its construction: d³ × 5√2/φ. When the edge length = 1, d = φ, and the formula becomes 5(φ+1)√2 ≈ 18.51223
Volume of Rhombic Dodecahedron (unit long diagonal) = 6d³
n = 12 d = long diagonal a = edge length d = a2√6/3 a = d√6/4 r = a√6/3 = d√6/4×√6/3 = d/2 face (in squares) = 2×a√6/3×a√3/3 = 2×(d√6/4)√6/3 × (d√6/4)√3/3 = d²√2/2 face (in triangles) = 4×a√6/3×a√3/3×2√3/3 = 4×(d√6/4)√6/3×(d√6/4)√3/3×2√3/3 = d²√6/3
n = 6 (square faces) n’ = 8 (hexagonal faces) a = edge length r = a√2 (radius to square face) r’ = a√6/2 (radius to hexagonal face) face (square face in squares) = a² face (square face in equilateral triangles) = a²4√3/3 face’ (hexagonal face in squares) = 6a²√3/4 face’ (hexagonal face in equilateral triangles) = 6a²
Volume (in cubes) = n/3 × face × r = 6/3 × a² × a√2 = 2a³√2 Volume (in tetrahedra) = n × face × r√6/2 = 6 × a²4√3/3 × a√2×√6/2 = 24a³ Volume’ (in cubes) = n’/3 × face’ × r’ = 8/3 × 6a²√3/4 × a√6/2 = 9a³√2 Volume’ (in tetrahedra) = n’ × face’ × r’√6/2 = 8 × 6a² × a√6/2×√6/2 = 72a³ Total Volume (in cubes) = 2a³√2 + 9a³√2 = 11a³√2 Total Volume (in tetrahedra) = 8a³ + 24a³ = 96a³
Volume of Rhombic Triacontahedron = (dφ)³ × 15√2
For a discussion of the 5-tetra-volume rhombic tricontahedron, see T and E Quanta Modules.
n = 30 (rhomboid faces) d = length of short diagonal dφ = length of long diagonal a = edge length = d√(φ+2)/2 d = 2a/√(φ+2) r = in-sphere radius = dφ²/2 r = in-sphere radius = a√(1+(2/√5)) face (in squares) = d²φ/2 face (in squares) = 2a²√5/5 face (in equilateral triangles) = d²φ × 2√3/3 face (in equilateral triangles) = 8a²√15/15
Volume (in cubes) = 4a³×√(5+2√5) Volume (in cubes) = n/3 × face × r = 30/3 × d²φ/2 × dφ²/2 = 5(dφ)³/2 Volume (in tetrahedra) = n × face × r√6/2 = [30] × [d²φ × 2√3/3] × [dφ²/2 × √6/2] = 5(dφ)³ × 3√2
When calculating areas in equilateral triangles, the perpendiculars are measured at 30° from the vertical, or 60° from the horizontal. The equivalent 90° measures require a conversion factor of 2√3/3.
The area for any polygon, regular or irregular, may be calculated by dividing it into rhombuses and/or triangles, calculating the areas of each, and then summing the results.
The area of any regular, symmetrical polygon, may be calculated using its midradius (the distance from the center to mid-edge) and circumference.
Square area = 1/2 × midradius × circumference Triangular area = 2√3/3 × midradius × circumference
The midradius is calculated from the circumradius, the distance from the center to any vertex.
midradius = circumradius × cos(180°/n), where n is the number of sides.
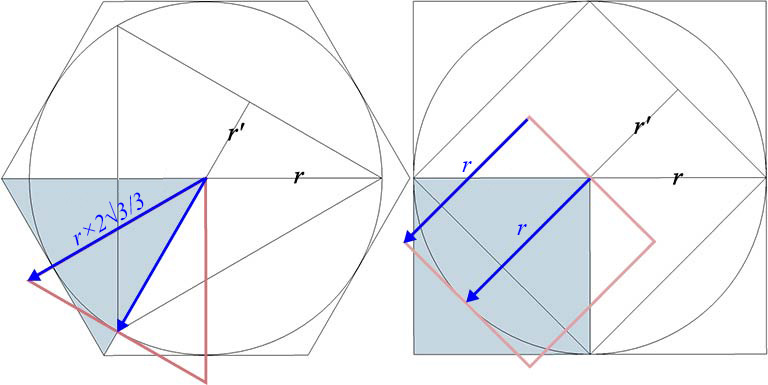
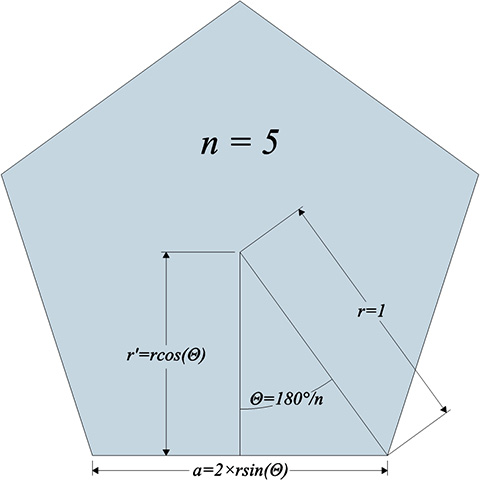
The following illustration shows the relationships between the number of sides, n, the circumradius, r, the midradius, r’, the edge length, a, and the angle 180°/n, Θ.
With the above illustration in mind, the area formulas become:
Square area = n/2 × r cos(Θ) × 2r sin(Θ) = n×sin(2Θ)/2 × r² Triangular area = n × (r cos(Θ) × 2√3/3) × 2×r sin(Θ) = n×sin(2Θ)/2 × 4r²√3/3
Note that as the number sides, n, approaches infinity, the expression, n×sin(Θ)/2, approaches pi (π). That is,
Square area = r² (∞×sin(360°/∞)/2) = πr² ≈ 3.141593×r² Triangular area = 4r²√3/3 × (∞×sin(360°/∞)/2) = πr²×4√3/3 ≈ 7.255197*×r²
* We might consider replacing pi (the ratio of the circumference of the circle to its diameter) with this number, the ratio of the circumference of the circle to the radius of its circumscribed hexagon. But then we might be likewise persuaded into replacing pi with the ratio of the circumference of the sphere to the radius of its circumscribed rhombic dodecahedron, which is a different number.