“You can “draw a line” only on the surface of some system. All systems divide Universe into insideness and outsideness. Systems are finite. Validity favors neither one side of the line nor the other. Every time we draw a line operationally upon a system, it returns upon itself. The line always divides a whole system’s unit area surface into two areas, each equally valid as unit areas. Operational geometry invalidates all bias.”
—R. Buckminster Fuller, Synergetics, 811.04
All of Fuller’s geometry is “operational” in the sense that it is conveyed and verified by physical models. The operations of synergetics includes constructions of sticks and flexible connectors, quanta modules, struts and string, wire, elastic cord, paper disks, clusters of ping-pong balls, a list of materials and operations limited only by our imaginations. Science without models is like language without metaphor. In the absence of metaphor, language is merely encoded logic. And without models, Fuller argued, science is equally impoverished. We need metaphor to formulate and articulate as yet unidentified concepts, and models are the metaphors of science. (See: Model Making.)
By way of introducing his operational geometry, Fuller would recall the basic operations of Euclidean geometry. Anyone who’s been through grade school has probably been taught how to use a draftsman’s compass, a straight edge, and a pencil, to repeat the familiar operation by which to find the perpendicular to a line and to construct an equilateral triangle.
Begin by drawing a circle with the dividers of the compass tightened to a fixed radius. Next, with the straight edge, draw a line from its center (c) to the circle’s perimeter. Fix the compass on the point where the line crosses the circle’s perimeter (c’) and draw another circle. Repeat and draw a third circle centered at the point where the straight line crosses the perimeter of the second circle (c”).
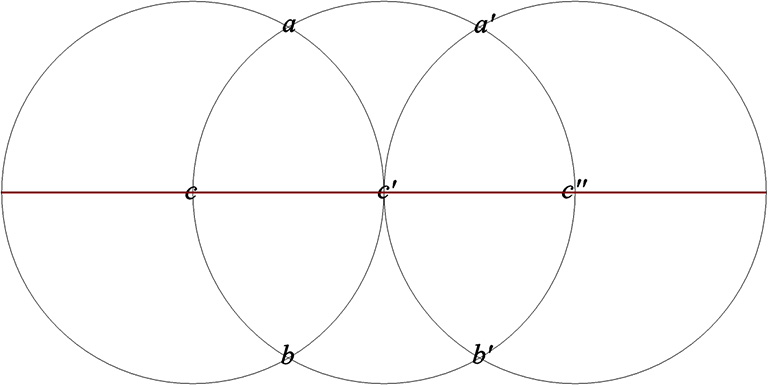
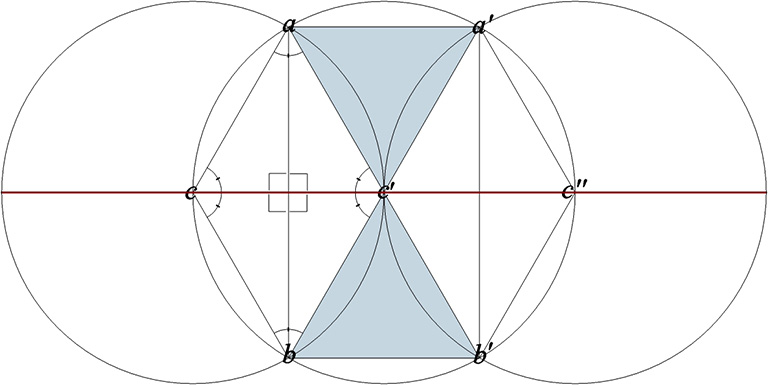
Now you have three circles bisected by a straight line running through the the circle centers, c, c’, and c”. The second circle crosses the first at two points, a and b. The third circle crosses the second at two points, a’ and b’. Lines drawn from a to b, and from a’ to b’ are perpendicular to the line drawn between the circle centers. Finally, draw lines between adjacent points to create six equilateral triangles in the shape of a hexagon.
Fuller often argued that the key shortcoming of plane geometry is its failure to account for the surface on which its operations are performed. The surface is a tool, just like the dividers, the straight edge, and the stick we scratch the surface with.
With the surface in mind, Fuller re-imagined the above operations as follows:
Begin by scribing a sphere. Granted, it isn’t possible to “scribe a sphere.” But we can imagine the process and perform the remaining operations on the surface of the sphere whose radius we are assured is identical with the fixed distance between the dividers of our compass. Mark a center anywhere on the sphere’s surface and draw a circle using the same compass. Next, just as before, draw a straight line from the center (C) to a point on the circle’s perimeter. And, remembering that straight lines on curved surfaces are, by definition, geodesics, we can continue drawing the line until it returns to the circle’s center and divides the sphere into two equal halves. Next, center the compass on one of the two points where the line crosses the perimeter of the circle and draw a second circle. Repeat, as above, to draw a third circle.
Now, when we connect the points as before with straight-line geodesics, we find that we have drawn four great circles. We know, operationally, that the length of the chords between the points is identical with the the sphere’s radius.
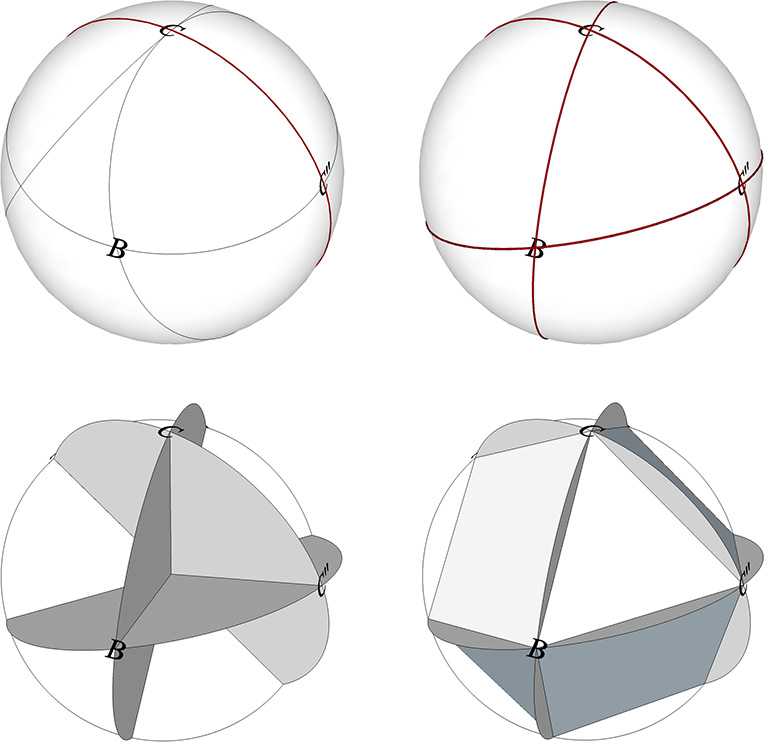
We have inadvertently constructed the eight equilateral triangles and six square faces of the vector equilibrium (VE). If we connect the points with the sphere center we create the eight tetrahedra and six half-octahedra that form the core of the isotropic vector matrix. And we have done it all operationally, without any calculations, and using only a compass, straight edge, and pencil.
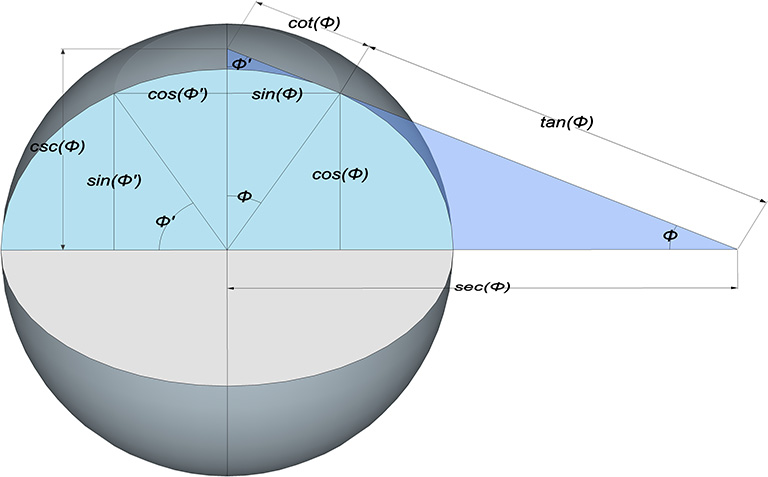
Fuller considered plane geometry to be a special case of the more general field of spherical trigonometry and topology. The Euclidean plane is a hemispheric section sliced through the middle of the sphere, and plane geometry is then the measurement of the chords whose central angles define the arcs of great circles drawn on the sphere’s surface.