The 31 great circles of the icosahedron disclose the following spherical polyhedra: the octahedron; icosahedron; pentagonal dodecahedon; icosidodecahedron; tricontahedron; and VE.
Octahedron
The two octahedra, the icosahedron, the pentagonal dodecahedron, and the tricontahedron, as well as the basic disequilibrium LCD triangle, are all disclosed in the 15 great circles defined by the icosahedron’s 15 edge-to-edge axes of spin. Each face of spherical octahedron contains 15 of the 120 LCD triangles.
Octahedron (with Inscribed Icosahedron)
The inscribed face of the regular icosahedron contains 6 of the 120 LCD triangles.
Pentagonal Dodecahedron
Each face of the pentagonal dodecahedron contains 10 of the 120 LCD triangles.
Triacontahedron
Each face of the triacontahedron contains 4 of the 120 LCD triangles
Icosidodecahedron
The icosidodecahedron is disclosed in the set of 6 great circles defined the icosahedron’s 6 vertex-to-vertex axes of spin. Both the triangular and pentagonal faces of the icosidodecahedron contain only partial LCD triangles.
Vector Equilibrium (VE or Cuboctahedron)
The vector equilibrium (VE) is disclosed in the 10 great circles defined by the icosahedron’s 10 face-to-face axes of spin. Both the triangular and square faces of the spherical vector equilibrium contain only partial LCD triangles.
The 25 great circles of the vector equilbrium (VE) disclose the following spherical polyhedra: the octahedra; the vector equilibrium (VE); the tetrahedron; the rhombic dodecahedron; and the cube.
Octahedron
The spherical octahedron is disclosed in the 3 great circles defined by the VE’s 3 square-face-to-face axes of spin. Each face contains 6 of the 48 LCD triangles.
Vector Equilibrium (VE or Cuboctahedron)
The spherical VE is disclosed in the 4 great circles defined by the VE’s 4 triangular-face-to-face axes of spin. Both the triangular and the square face contain only partial LCD triangles.
Tetrahedron
The spherical tetrahedron, rhombic dodecahedron, and cube are disclosed in the 6 great circles of the VE’s 6 vertex-to-vertex axes of spin. Each face contains 12 of the 48 LCD triangles.
Rhombic Dodecahedron
Each face of the spherical rhombic dodecahedron contains 4 of the 48 LCD triangles.
Cube
Each face of the spherical cube contains 8 of the 48 LCD triangles.
Octahedron (alternate)
An alternate spherical octahedron is disclosed in the 12, 6, and 4 great circles defined by the VE’s 12 edge-to-edge, 6 vertex-to-vertex, and 4 triangular-face-to-face axes of spin. Each face contains 3 full, and 6 partial LCD triangles.
“The whole of synergetics’ cosmic hierarchy of always symmetrically concentric, multistaged but continually smooth (click-stop subdividing), geometrical contracting from 20 to 1 tetravolumes (or quanta) and their successive whole-number volumes and their topological and vectorial accounting’s intertransformative convergence-or-divergence phases … elucidate conceptually, and by experimentally demonstrable evidence, the elegantly exact, energetic quanta transformings by which:
energy-exporting structural systems precisely accomplish their entropic, seemingly annihilative quantum “losses” or “tune-outs,” and;
new structural systems appear, or tune in at remote elsewheres and elsewhens, thereafter to agglomerate syntropically with other seemingly “new” quanta to form geometrically into complex systems of varying magnitudes, and how;
such complex structural systems may accommodate concurrently both entropic exporting and syntropic importing, and do so always in terms of whole, uniquely frequenced, growing or diminishing, four-dimensional, structural-system quantum units.”
—R. Buckminster Fuller, Synergetics, 270.11
With the regular tetrahedron as the unit measure of volume, most of the regular polyhedra have whole number or rational volumes. Fuller takes credit for this discovery and considered it one his most significant.
Image
Polyhedron
Volume in Tetrahedra
Quanta Modules
Tetrahedron
1
Total: 24; A: 24; B: 0
Half Octahedron
2
Total: 48; A: 24; B: 24
Cube (unit diagonal)
3
Total: 72; A: 48; B: 24
Octahedron
4
Total: 96: A: 48; B: 48
Rhombic Triacontahedron
5
Total: 120: A: 0; B: 0; T: 120
Rhombic Dodecahedron
6
Total: 144; A: 96; B: 48
Note that the volume 5 rhombic triacontahedron is constructed, uniquely, of T quanta modules. Though the T module is identical in volume to the A and B quanta modules, and therefore rationally commensurate with the regular tetrahedron, all of its edge lengths—and the edge lengths of the rhombic triacontahedron constructed from them—are irrational. The in-sphere diameter of the volume 5 rhombic triacontahedron—and the outside edge of the unfolded T Module (×2)—is about 0.9994833324, so very close to 1 that Fuller assumed it had to be a computational error. Mathematicians eventually convinced him that the difference was real and measurable. For further discussion on this topic, see T and E Quanta Modules.
Other polyhedra so far discovered with whole number volumes in tetrahedra include the Kelvin truncated octahedron with a volume of 96, the pyritohedron, with a volume of 24, and, presumably, the tetrakaidecahedron of the Weaire-Phelan matrix which should have the same volume as its companion pyritohedron. See The Kelvin Truncated Octahedron, and; Pyritohedron Dimensions and Whole-Number Volume.
“All structures, properly understood, from the solar system to the atom, are tensegrity structures. Universe is omnitensional integrity” —R. Buckminster Fuller, Synergetics, 700.04
All structures, from the quantum to the cosmological, consist of islands of compression held together by a continuous web of tension. Continuous surfaces and solids are emergent properties of scale. At cosmological scales, the islands of compression are clusters of matter—dust clouds, planets, galaxies, etc.— in which inertial forces (and, perhaps, something called “dark energy”) provide the resistance in opposition to universal gravitation, the continuous web of tension that is mass attraction. At the microscopic level, the islands of compression are atoms and molecules in which radiant energy provides compressive resistance against the electromagnetic and nuclear forces providing the continuous web of tension that binds molecules and atoms together.
Gravity and inertia, the electromagnetic force and electromagnetic radiation, and tension and compression are all as inseparable from one another as the the push and pull of steel spring. Each pair, though often presented as fundamentally distinct phenomena, are really two views of the same thing, like the convex and concave surfaces of the sphere.
“Tensegrity” is a portmanteau of tension and integrity. It refers to standalone structures that would have as much integrity in the vacuum of space as on the earth’s surface. In its purest form, a tensegrity structure consists of isolated rigid elements, struts, suspended in an unbroken web of tension, tendons. Fuller’s geodesic domes constitute a special case of tensegrities, which constitute the more general class, and the way to an intuitive understanding of geodesic domes is to understand tensegrities first.
The three basic structural polyhedra, the tetrahedron, octahedron, and icosahedron, can be constructed using these principles. The struts comprising their edges do not touch, but are held in place by the tendons that form a continuous tension web.
The three structural tensegrity polyhedra: the tetrahedron; octahedron, and icosahedron
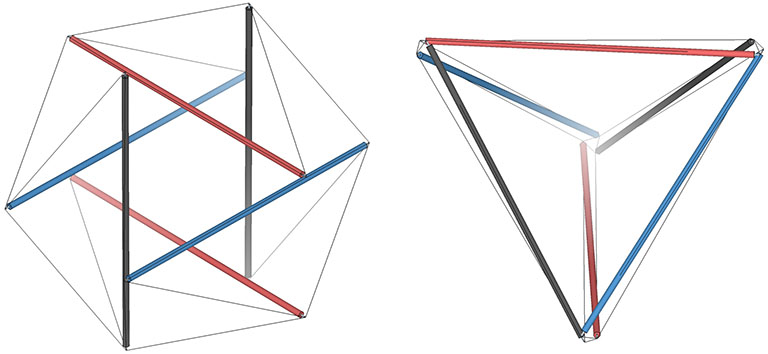
Though perhaps not immediately apparent, the three tensegrity polyhedra are transformations of the three tensegrity spheres; the 6-strut Jessen icosahedron, the 12-strut cuboctahedron, and the 30-strut icosidodecahedron.
The three tensegrity spheres: the 6-strut Jessen icosahedron; the 12-strut cuboctahedron; and the 30-strut icosidodecahedron.
The transformation involves the clockwise or counter-clockwise torque of the struts. All transformations between the spherical and polyhedral phases are stable. However, the 12- and 30-strut tensegrities are configured as either right- or left-handed and will transform in one direction only. Only the 6-strut tensegrity is ambidextrous; the same spherical condition transforms into either a positive or a negative (right- or left-handed) tetrahedron depending on whether the struts are torqued to the right or to the left. This is in keeping with the unique duality of the tetrahedron. See: The Dual Nature of the Tetrahedron.
The six-strut tensegrity takes on the shape of the regular tetrahedron, either positive or negative, as four (of eight) triangular tension loops approach minimum radius
The 12-strut tensegrity takes on the shape of the regular octahedron as the six square tension loops approach minimum radius.
The 30-strut tensegrity takes on the shape of the regular icosahedron as the twelve pentagonal tension loops approach minimum radius.
The struts of the three spherical tensegrities are arranged in a pattern of intersecting great circles, or geodesics, each of which divide the sphere into two equal halves: the six-strut tensegrity sphere consists of three intersecting great circle rings of two struts each; the twelve-strut spherical tensegrity consists of four great circle rings of three struts each; and the thirty-strut tensegrity consists of six intersecting great circle rings of five struts each.
The three spherical tensegrities of the tetrahedron (left), icosahedron (middle), and octahedron (right) consist of intersecting great circles rings
This suggests an alternative construction of the tensegrity spheres that has the great circles forming discrete tension loops with the tendons emerging from the strut ends and passing directly under (or through) the cross struts, or “danglers”. The great circles intersect in a stable basket-weave pattern. This strut-and-sling alternative emphasizes the equilibrium state of the spherical tensegrities, as opposed to their more disequibrious, semi-polyhedron states. See: Tensegrity Equilibrium and Vector Equilibrium.
The great circles of the spherical tensegrities may be joined by “slings” or great circle loops passing under or through the cross-struts (“danglers”) to form an alternate construction that is stable and structurally sound.
In the transformation from tensegrity sphere to polyhedron, the struts forming the great circles diverge along the path of their danglers. Their paths encircle the polyhedron in zigzag patterns that constitute a geodesic or equatorial “wave” consisting of the primary struts and their danglers.
Note that the great circles of the 12- and 30-strut tensegrities incorporate one dangler each from all of the other great circles. That is, all their great circles intersect each of the others. The great circles of six-strut tensegrity, however, are unique; the struts from only one of the two other great circles serve as danglers in any given great circle. That is, each great circle incorporates all the struts from two and none from the third. This, again, points to the dual nature of the tetrahedron.
In the figure below, the three great circles of the six-strut tensegrity sphere are arranged as follows in its tetrahedron counterpart:
red-blue-red-blue (red great circle incorporates only blue danglers);
blue-black-blue-black (the blue great circle incorporates only black danglers);
black-red-black-red (the black great circle incorporates only red danglers).
The two-strut great circles of the six-strut tensegrity follow three zigzag paths around the tetrahedron, connected by their danglers.
The four great circles of the twelve-strut tensegrity incorporate struts from each of the others to form six-strut equatorial bands around the face-to-face poles of the octahedron. Note that the four-strut equatorial bands of the octahedron’s three vertex-to-vertex poles incorporate one strut each from all four great circles.
In the figure below, the four great circles of the 12-strut tensegrity sphere are arranged as follows in its octahedron counterpart:
red-gray-red-blue-red-green
blue-red-blue-green-blue-gray
green-blue-green-red-green-gray
gray-blue-gray-green-gray-red
The three-strut great circles of the twelve-strut tensegrity follow four zigzag paths around the octahedron, connected by their danglers.
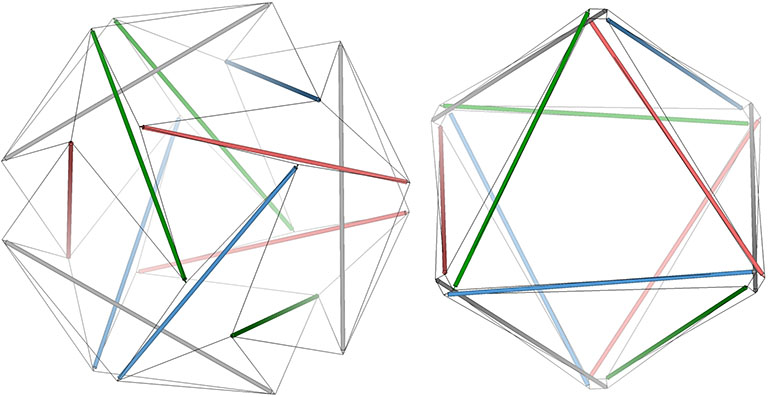
The six great circles of the thirty-strut tensegrity incorporate struts from each of the others to form ten-strut equatorial bands around the vertex-to-vertex poles of the icosahedron. Note that six-strut equatorial bands of the icosahedron’s five face-to-face poles incorporate one strut each from all six great circles.
The five-strut great circles of the thirty-strut tensegrity follow six zigzag paths around the icosahedron, connected by their danglers.
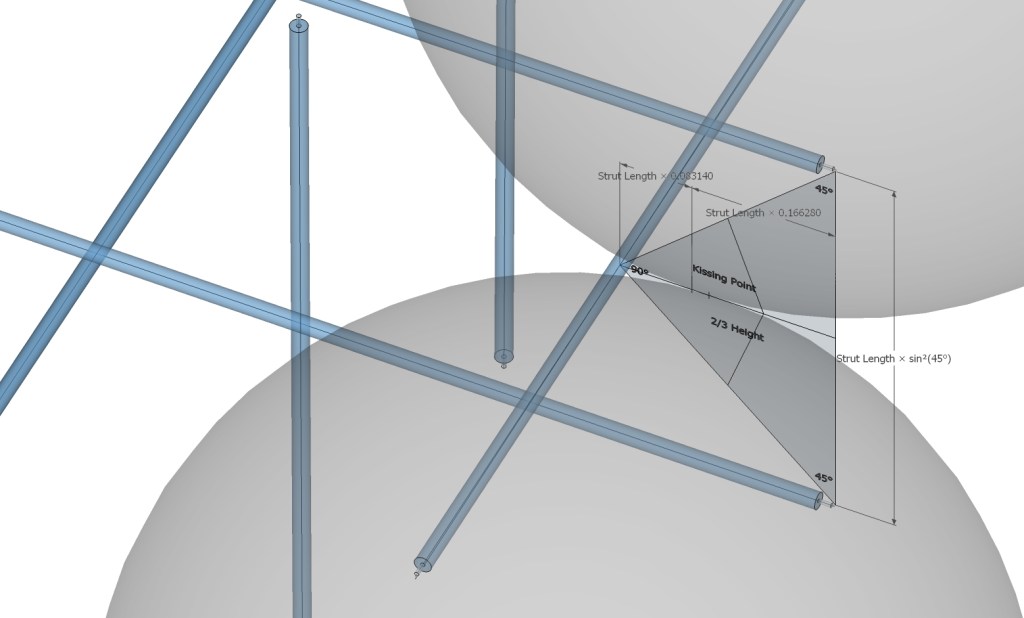
The spherical tensegrities relate to the close packing of spheres. In their “relaxed” states, the strut ends straddle the points of contact between the spheres, what Fuller called the “kissing points.” The kissing points lie on the plane connecting the midpoint of the dangler with the endpoints of its two supporting struts.
In the 12-strut tensegrity, this forms an equilateral triangle whose base edge length (the distance between the supporting struts’ endpoints) equals the strut length multiplied by sin²(30°), or 0.25. The distance from the midpoint of the dangler to the kissing point is approximately 0.066987 times the strut length.
The kissing points of the 12-strut spherical tensegrity lie on the plane connecting the midpoint of the dangler with the endpoints of its supporting great-circle struts.
In the 30-strut tensegrity, this forms an 36° 72° 72° isosceles triangle whose base edge length (the distance between the supporting struts’ endpoints) equals the strut length multiplied by sin²(18°), or about 0.095492. The distance from the midpoint of the dangler to the kissing point is approximately 0.03956 times the strut length.
The kissing points of the 30-strut spherical tensegrity lie on the plane connecting the midpoint of the dangler with the endpoints of its supporting great-circle struts.
In the 6-strut tensegrity, this forms an 90° 45° 45° isosceles triangle whose base edge length (the distance between the supporting struts’ endpoints) equals the strut length multiplied by sin²(45°), or 0.5. The distance from the midpoint of the dangler to the kissing point is approximately 0.083140 times the strut length.
The kissing points of the 6-strut spherical tensegrity lie on the plane connecting the midpoint of the dangler with the endpoints of its supporting great-circle struts.
In their polyhedron states, the strut ends approach the sphere centers. In the twelve-strut tensegrity, the strut ends move from the kissing points to the centers of the six spheres defining the octahedron:
The square vertex loops of the 12-strut tensegrity sphere contract to define the six vertices of the tensegrity octahedron, while the triangular loops expand to define its eight faces.
In the thirty-strut tensegrity, the strut ends move from the kissing points to the centers of the twelve spheres defining the icosahedron:
The pentagonal vertex loops of the 30-strut tensegrity sphere contract to define the twelve vertices of the tensegrity icosahedron while the triangular loops expand to define its twenty faces.
In the six-strut tensegrity, the strut ends move from the kissing points to the centers of the six spheres defining the tetrahedron. Because the six-strut tensegrity can be twisted to form either a positive or a negative tetrahedron, it can oscillate between the two in an uninterrupted transformation.
The triangular vertex loops of the 12-strut tensegrity sphere contract in either a clockwise or counter-clockwise direction to define the six vertices of either the positive or negative tensegrity octahedron, while the triangular loops expand to define its six faces.
This unique ability of the tetrahedron to turn itself inside out provides another model of the the sphere-to-space, space-to-sphere oscillations of the jitterbug. If we replace the tetrahedra in the vector model with the six-strut tensegrity, its oscillations between the positive and the negative tetrahedron alternately define the nuclear sphere at the the center of the VE, and the concave VE at the center of the octahedron.
Sphere centers and interstices are identified by tendon loops in the spherical tensegrities. In the figure below, the red polygonal (square) loops of the relaxed 12-strut tensegrity are coincident with the sphere centers, and the yellow triangular loops are coincident with the interstices. See Spheres and Spaces.
12-strut tensegrity sphere with its six square vertex loops (red) encompassing the spherical voids defined by the eight concave octahedra interstices which the eight triangular face loops (yellow) encompass.
If we apply a counter-clockwise torque to a clockwise (and vice versa) 12-strut tensegrity, we force the tensegrity into the unstable* configuration of the cube.
The counter-clockwise torque of a clockwise (and vice versa) 30-strut tensegrity forces it into the unstable* configuration of the pentagonal dodecahedron. Because the 12- and 30-strut tensegrities must always and only be either right- or left-handed, and never both simultaneously, nature disallows these operations.
* “Unstable” may be too strong a word. The tensegrities of otherwise non-rigid (i.e., non-triangulated) polyhedra, like the cube and the pentagonal dodecahedron do hold their shape. However, their strength decreases as the diameter of their vertex loops shrink to points.
Fuller described tensegrities as balloons evacuated of all the supporting gas except for those molecules actively careening around the inside surface on trajectories that are the chords of geodesics. The underlying structure is disclosed by replacing those careening molecules with static struts, and then removing all of the balloon’s skin except for a continuous web of tensile fibers holding the struts in place. A very high frequency tensegrity sphere with all redundancy and non-essential components removed could, in theory, be reduced to molecular bonds, atomic bonds, and ultimately disappear entirely into highly organized quantum fields.
There is another class of tensegrities commonly called tensegrity prisms. The simplest in this class consists of three struts and nine tendons, and has the shape of a triangular prism with the top triangle twisted at 30° from the bottom triangle. Any number of tensegrity prisms are possible. Each is defined by the number of struts which corresponds to the number of sides in the polygon on which is based. In the figure below are tensegrity prisms based on polygons with 3, 4, 5, 6, and 10 sides.
Tensegrity prisms based on polygons of 3, 4, 5, 6, and 10 sides.
The angle at which the top polygon is twisted in relation to the bottom polygon is a constant and is given by the formula,
90°-(180°/n)
where n is the number of struts, or sides of the polygon on which it is based.
Tensegrity prisms have been combined to form columns, lattices, and complex hyperbolic surfaces. They have also been employed in multi-layered geodesic domes. The possibilities are practically unlimited.
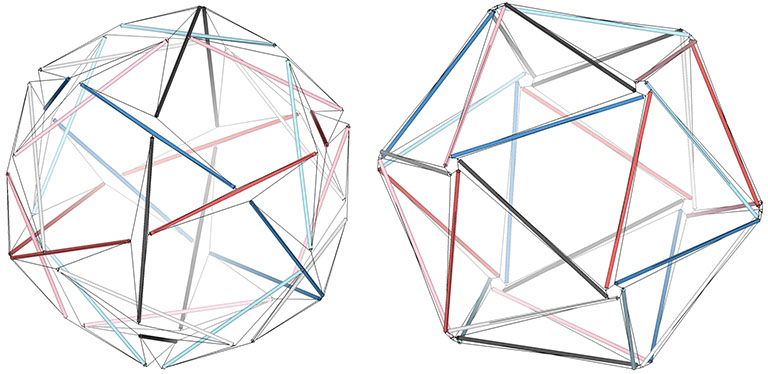
Though building codes assessed Fuller’s geodesic domes as conventional truss networks, they were designed and engineered as tensegrity structures. Redundancies were then added to please the inspectors, and to satisfy the clients’ desire for something that looked substantial. Most were based on the icosahedron, with the 30-strut tensegrity sphere serving as the base model. Regular, triangular subdivisions of the icosahedron create the primary faces of the geodesic polyhedra, all of which (if based on the icosahedron) will have 12 vertices with 5 members, and a larger number of vertices with 6 members. In the spherical tensegrities, these form tension loops of pentagons and hexagons.
120-strut tensegrity sphere enclosing a 4F Class 1 geodesic polyhedron.
All the spherical tensegrities can be reduced to geodesic polyhedra. If we draw in to a point the pentagonal and hexagonal loops in the 120-strut tensegrity sphere above, its 80 triangles enlarge to form the 2F Class 1 geodesic polyhedron.
120-strut tensegrity sphere reduced to a 2F Class 1 geodesic polyhedron
As frequency and the number of struts increases in the spherical tensegrities, the distance between the struts decreases and the tension and compression elements begin to merge in accordance with the following identities:
where n = the number of sides in the great (or lesser) circle being assessed. It is the case with most of Fuller’s geodesic domes that the tension web runs through the struts and is therefore implied rather than explicit.
As the frequency (and number of struts) increases, the compression struts of the spherical tensegrities begin to occupy the same space as the tension elements. The structural principles, however, continue to apply: Despite appearances, the top struts in both images, top and bottom, are being held in place by tension; their tendency is to spring away from the bottom strut which might otherwise appear to support them. The equations assume a unit strut length in a circle of n sides.
Fuller saw great engineering potential in the understanding of structure as tensegrity:
“As the world’s high-performance metallic technologies are freed from concentration on armaments, their structural and mechanical and chemical performances (together with the electrodynamic remote control of systems in general) will permit dimensional exquisiteness of mass-production-forming tolerances to be reduced to an accuracy of one-hundredth-thousandths of an inch. This fine tolerance will permit the use of hydraulically pressure-filled glands of high-tensile metallic tubing using liquids that are nonfreezable at space-program temperature ranges, to act when pressurized as the discontinuously isolated compressional struts of large geodesic tensegrity spheres. Since the fitting tolerances will be less than the size of the liquid molecules, there will be no leakage. This will obviate the collapsibility of the air-lock-and-pressure- maintained pneumatic domes that require continuous pump-pressurizing to avoid being drag-rotated to flatten like a candle flame in a hurricane. Hydro-compressed tensegrities are less vulnerable as liquids are noncompressible.
“Geodesic tensegrity spheres may be produced at enormous city-enclosing diameters. They may be assembled by helicopters with great economy. This will reduce the investment of metals in large tensegrity structures to a small fraction of the metals invested in geodesic structures of the past. It will be possible to produce geodesic domes of enormous diameters to cover whole communities with a relatively minor investment of structural materials. With the combined capabilities of mass production and aerospace technology it becomes feasible to turn out whole rolls of noncorrosive, flexible-cable networks with high-tensile, interswaged fittings to be manufactured in one gossamer piece, like a great fishing net whose whole unitary tension system can be air-delivered anywhere to be compression-strutted by swift local insertions of remote-controlled, expandable hydro-struts, which, as the spheric structure takes shape, may be hydro-pumped to firm completion by radio control.
“In the advanced-space-structures research program it has been discovered that—in the absence of unidirectional gravity and atmosphere—it is highly feasible to centrifugally spin-open spherical or cylindrical structures in such a manner that if one-half of the spherical net is prepacked by folding below the equator and being tucked back into the other and outer half to form a dome within a dome when spun open, it is possible to produce domes that are miles in diameter. When such structures consist at the outset of only gossamer, high-tensile, low-weight, spider-web-diameter filaments, and when the spheres spun open can hold their shape unchallenged by gravity, then all the filaments’ local molecules could be chemically activated to produce local monomer tubes interconnecting the network joints, which could be hydraulically expanded to form an omniintertrussed double dome. Such a dome could then be retrorocketed to subside deceleratingly into the Earth’s atmosphere, within which it will lower only slowly, due to its extremely low comprehensive specific gravity and its vast webbing surface, permitting it to be aimingly-landed slowly, very much like an air-floatable dandelion seed ball: the multi-mile-diametered tensegrity dome would seem to be a giant cousin. Such a space- spun, Earth-landed structure could then be further fortified locally by the insertion of larger hydro-struttings from helicopters or rigid lighter-than-air- ships—or even by remote-control electroplating, employing the atmosphere as an electrolyte. It would also be feasible to expand large dome networks progressively from the assembly of smaller pneumatic and surface-skinning components.
“The fact that the dome volume increases exponentially at a third-power rate, while the structural component lengths increase at only a fraction more than an arithmetical rate, means that their air volume is so great in comparison to the enclosing skin that its inside atmosphere temperature would remain approximately tropically constant independent of outside weather variations. A dome in this vast scale would also be structurally fail-safe in that the amount of air inside would take months to be evacuated should any air vehicle smash through its upper structure or break any of its trussing.
“In air-floatable dome systems metals will be used exclusively in tension, and all compression will be furnished by the tensionally contained, antifreeze-treated liquids. Metals with tensile strengths of a million p.s.i. will be balance-opposed structurally by liquids that will remain noncompressible even at a million p.s.i. Complete shock-load absorption will be provided by the highly compressible gas molecules—interpermeating the hydraulic molecules—to provide symmetrical distribution of all forces. The hydraulic compressive forces will be evenly distributed outwardly to the tension skins of the individual struts and thence even further to the comprehensive metal- or glass-skinned hydro-glands of the spheroidally enclosed, concentrically-trussed-together, dome-within-dome foldback, omnitriangulated, nonredundant, tensegrity network structural system.“ —R. Buckminster Fuller, Synergetics, sections 785.03-07, (1975)
“These helical columns of tetrahedra, which we call the tetrahelix, explain the structuring of DNA models of the control of the fundamental patterning of nature’s biological structuring as contained within the virus nucleus. It takes just 10 triple-bonded tetrahedra to make a helix cycle, which is a molecular compounding characteristic also of the Watson-Crick model of the DNA. When we address two or more positive (or two or more negative) tetrahelices together, they nestle their angling forms into one another. When so nestled the tetrahedra are grouped in local clusters of five tetrahedra around a transverse axis in the tetrahelix nestling columns. Because the dihedral angles of five tetrahedra are 7° 20′ short of 360°, this 7° 20′ is sprung-closed by the helix structure’s spring contraction. This backed-up spring tries constantly to unzip one nestling tetrahedron from the other, or others, of which it is a true replica. These are direct (theoretical) explanations of otherwise as yet unexplained behavior of the DNA.” —R. Buckminster Fuller, Synergetics, caption to fig. 933.01
Regular tetrahedra do not combine to fill all space. They can however be face-bonded to form a helical structure Fuller called the “tetrahelix.”
Three constructions of the tetrahelix: a double helix of regular tetrahedra (top); a triple helix of close packed unit spheres (middle); and a wireframe model exposing its complete structure (bottom)
The tetrahelix can be constructed as a single, double, or triple helix, oriented either clockwise or counter-clockwise. The single helix completes about 10 cycles per 30 tetrahedra; the double helix completes about 5, and the triple helix completes about 1 cycle per 30 tetrahedra.
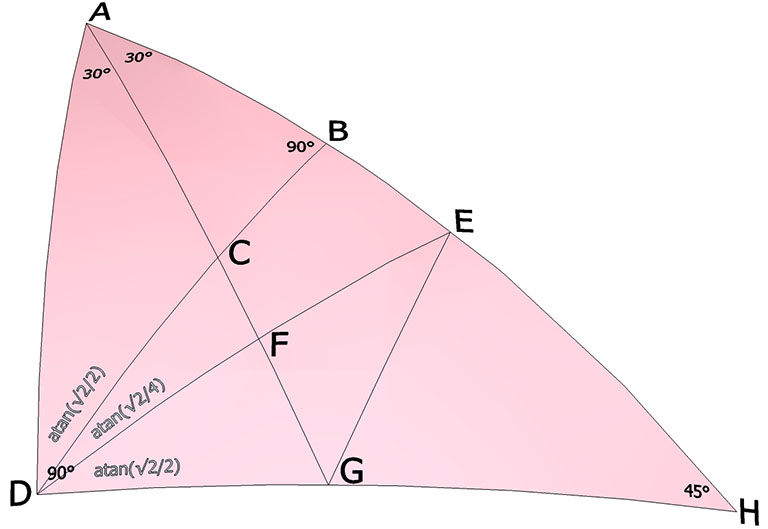
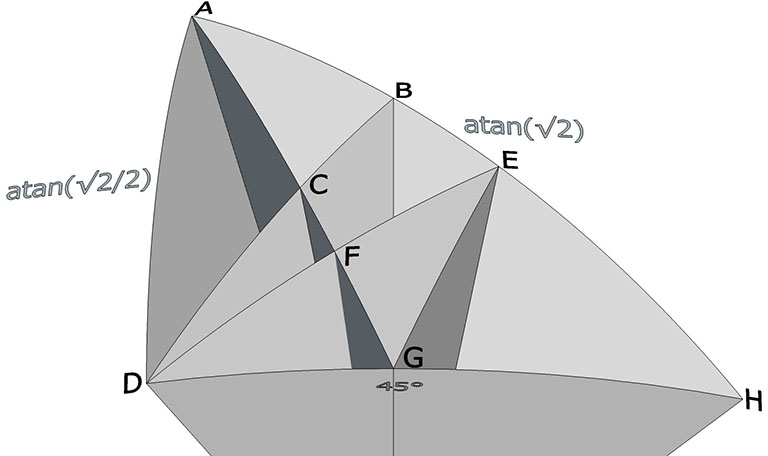
The single helix is folded from a ribbon of equilateral triangles, with alternating folds in the same direction of 2arctan(√2/4) ≈ 38.931629° and 2arctan(√2) ≈ 109.471221°.
Tetrahelix constructed as a counter-clockwise single helix folded from a single-wide ribbon of equilateral triangles. It completes about 10 cycles per 30 tetrahedra.
The double helix is folded from 2-panel-wide ribbon. The two panels are folded inward at 2arctan(√2/4) ≈ 38.931629°, and the individual triangles are folded in an alternating pattern of 2arctan(√2/5) ≈ 31.586338° away, and 2arctan(√2) ≈ 109.471221° away.
Tetrahelix constructed as a clockwise double helix from a double-wide ribbon of equilateral triangles. It completes about 5 cycles per 30 tetrahedra.
The triple helix is folded from 3-panel-wide ribbon. Each panel is folded the length of the ribbon at 2arctan(√2) ≈ 109.471221°. The individual triangles are folded in an alternating pattern of 2arctan(√2/4) ≈ 38.931629° away, and 2arctan(√2/5) ≈ 31.586338° toward.
Tetrahelix constructed as a counter-clockwise triple helix from a triple-wide ribbon of equilateral triangles. It completes about 1 cycle every 30 tetrahedra
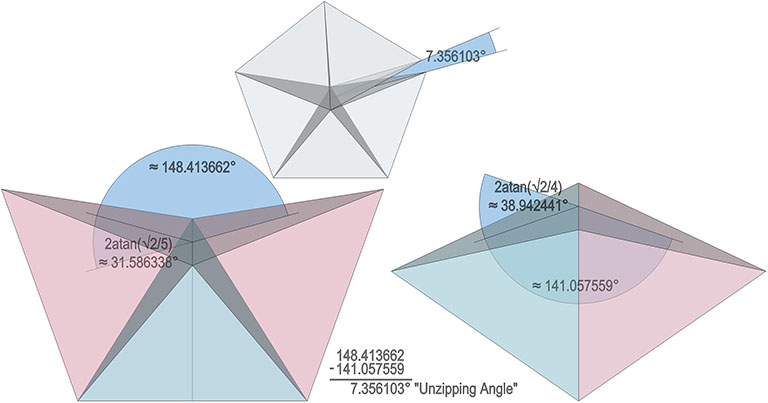
A casual assessment of the triple helix might lead to the assumption that the two angles between which the three helices oscillate, i.e are folded in a repeating pattern of one fold up, and one fold down, etc., are the same angle. They are not. As a consequence, one tetrahelix cannot be nested with another. There is always a gap of approximately 7.356103°, which causes them to spring apart. Fuller called this gap the “unzipping angle”, and thought it might explain the behavior of replicating DNA molecules.
The two dihedral angles of the triple-helices of the tetrahelix might at first glance appear identical. Fuller called the difference between the two the “unzipping angle,” in reference to the DNA molecule’s replication behavior.
The models of the tetrahelix so far discussed are constructions that result in only the outer shell of the tetrahelix, i.e., a hollow tube with no interior faces. The interior faces can be folded from a separate strip. In the illustration below, two strips of triangles are folded and combined as a double helix that constitutes the surface of the tetrahelix, and a third strip of triangles is folded to constitute its internal structure. The third strip which is enclosed by the other two is is folded at angles of arctan(2√2) ≈ 70.528779° alternately toward and away. Its striking similarity to the structure of the DNA molecule, i.e. a double helix with paired connections, was not lost on Fuller.
Two ribbons combine to form the surface a double helix, while a third provides the interior connections between them.
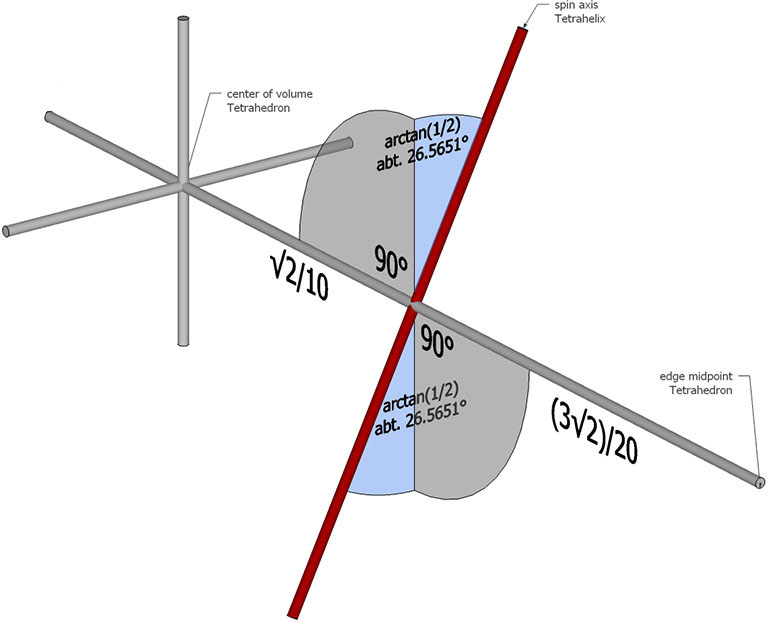
The helical axis does not pass through through the center of volume of any of its constituent tetrahedra. With the edge length taken as unity, the spin axis of the tetrahelix crosses an edge-to-edge axis of each tetrahedron perpendicularly at a distance of √2/10 from its center of volume, and is tilted at an angle of arctan(1/2), about 26.565051°.
The spin axis of the tetrahelix (red) in relation to the tetrahedron’s edge-to-edge axes (gray) and center of volume.
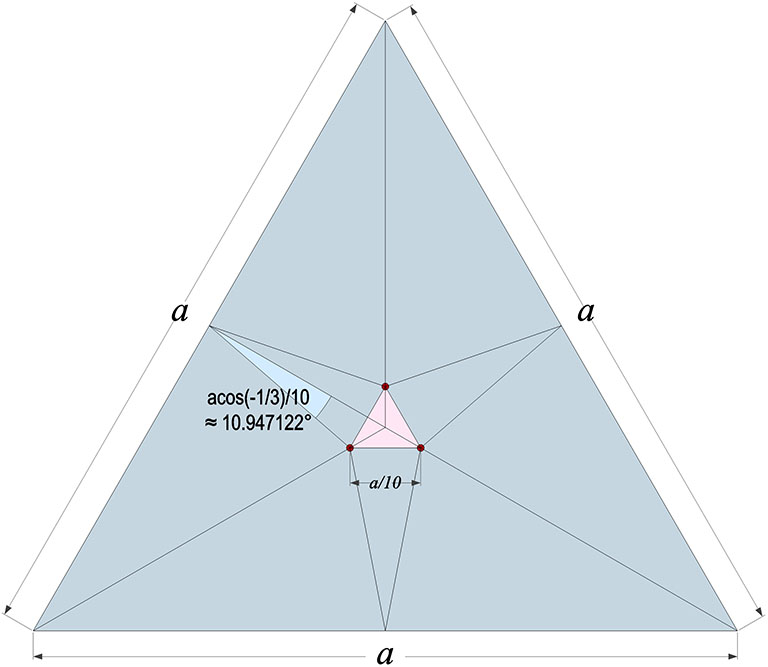
The point at which all possible spin axes pass through the tetrahedron’s faces appears to be precisely arctan(√2)/5, or about 10.947122° off-center along lines drawn from a vertex to the midpoint of the opposite edge. Their points of intersection form an equilateral triangle centered on the face with edge length 1/10th that of the face.
The spin axis of the tetrahelix intersects the faces of its constituent tetrahedra at one of three points (red dots) defined by the vertices of an equilateral triangle (pink), centered on the face, with edge lengths 1/10th that of the tetrahedra.
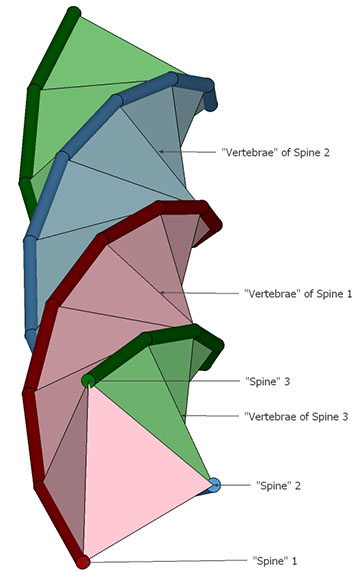
Each tetrahedron is rotated about the helical axis at an angle of arctan(2/√5)+90°, or arccos(-2/3), about 131.810315°, from the one below it. Every third tetrahedron constitutes a “vertebra” of one of the three “spines” of the tetrahelix.
Every third tetrahedron (pink, blue, and green) constitutes a vertebra of one of three spines (pink, blue and green) that run along the outer edges of the tetrahelix.
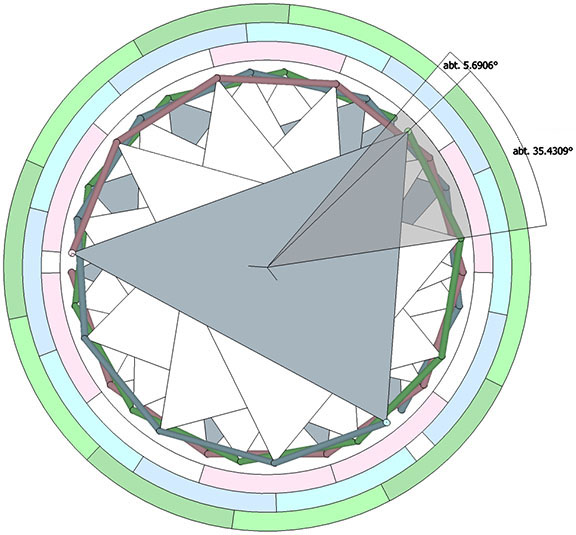
Curiously, the number of tetrahedra is not rationally commensurable with the helical cycle. The helix appears to complete one cycle every 30 tetrahedra, but careful measurement shows the rotation to be just short of 360°. Each vertebra is rotated at an angle of 3arctan(2/√5) – 90°, about 35.430945° from the previous. Ten vertebrae almost, but not quite, complete one 360° cycle. With r being the rotation per vertebra, the difference is 360-(10r) ≈ 5.690553°.
Tetrahelix viewed from the top. Three outside rings (pink, blue, and green) divided into arcs of ≈ 35.430945° indicate the degree to which each vertebra is rotated from the one below it in each of three spines of the same color. Ten rotations sum to a combined total of about 5.6906° less than 360°.
One might assume that one and only one helix may be formed from each of the four faces of the tetrahedron, i.e., that there are four (4) possible helical constructions. Further consideration may allow for clockwise and counter-clockwise helices, making for a total of eight (8) possibilities. Actually, there are twelve (12) unique axes upon which the helix can be constructed.
Each of the twelve axes can be illustrated with a cube placed inside a regular tetrahedron and sized such that four of its eight corners intersect the four faces of the tetrahedron as an equilateral triangle of edge length 1/10th that of the tetrahedron. Each of the twelve axes is described by lines connecting the vertices of the triangle with the center of the cube’s face with which it intersects.
The twelve potential axes of the tetrahelix can be illustrated with cube inside the tetrahedron with four corners intersecting the faces as a triangle with 1/10th edge-length of the tetrahedron.
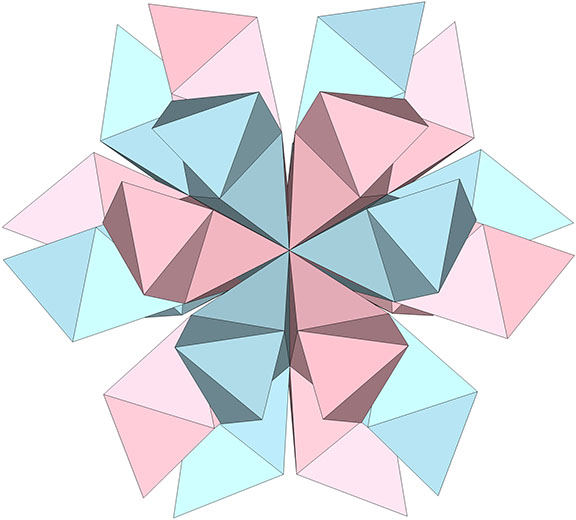
The twelve unique helices alternate between clockwise and counter-clockwise constructions.
Twelve tetrahelices, six clockwise and six counter-clockwise, emerging from a single tetrahedron.
Given the fact that the number of tetrahedra is incommensurate with helical cycle, and the fact that its angles are all individually and mutually irrational, the number of configurations possible from serial inside-outing of tetrahedra, including the number of possible orientations of the individual tetrahedra in a fixed coordinate system, may be infinite.
“The XYZ-rectilinear coordinate system of humans fails to accommodate any finite resolution of any physically experienced challenge to comprehension. Physical experience demonstrates that individual-unit wavelength or frequency events close-pack in spherical agglomerations of unit radius spheres.” —R. Buckminster Fuller, Synergetics, 260.31
Unit-radius spheres close pack in three fundamentally different ways:
linearly as discrete triple helices of face-bonded tetrahedra (see Tetrahelix).
Spheres close-pack radially around a nuclear sphere as vector equilibria (top left), as icosahedral shells (top right), and as discrete triple helices of face-bonded tetrahedra (bottom).
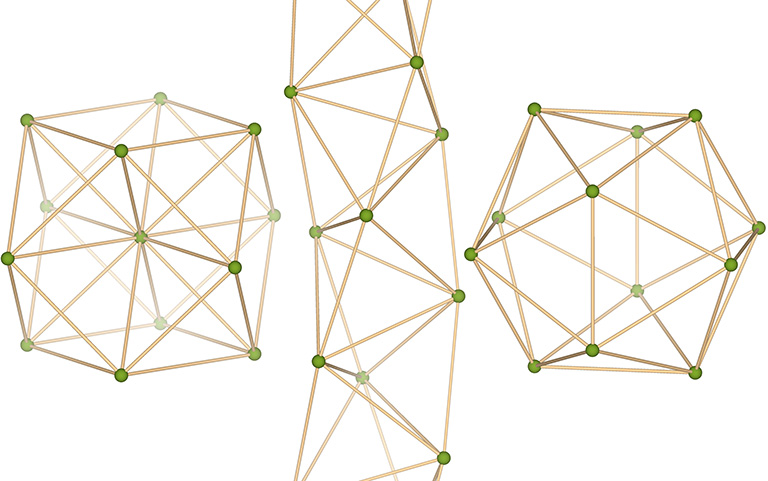
The relative stability of these arrangements is perhaps made more clear when modeled with unit-length sticks, representing the vectors connecting sphere centers, and flexible connectors. The radial array on the left is the vector equilibrium (VE) and isotropic vector matrix; the linear array in the middle is the tetrahelix; and the lateral array on the right is the icosahedral shell.
Vector models of close-packed spheres. The vector equilibrium (left) models radial close-packing; the tetrahelix (middle) models linear or helical close packing; and the icosahedron (right) models lateral close packing as discrete shells.
The transformation between the isotropic radial array and the linear (helical) array can be described as three face-bonded tetrahedra transforming into a single octahedron.
6 spheres close pack as three tetrahedra or as a single octahedron, spontaneously transforming between the two.
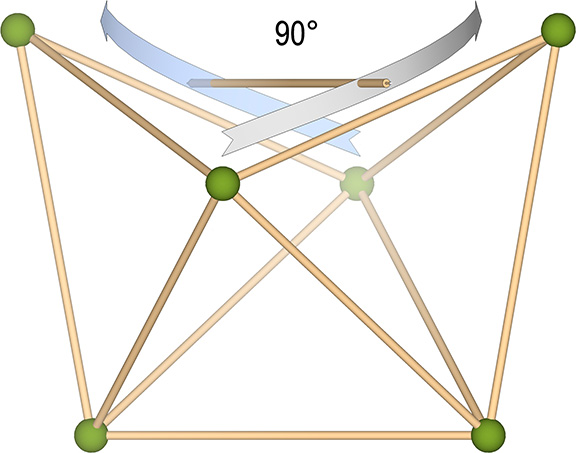
The structural transformation is more clearly illustrated with a vector model.
Vector model of 6 spheres close packed as three face-bonded tetrahedra spontaneously transforming into a single octahedron through a 90° rotation of one vector.
Fuller thought this transformation modeled quantum energy dispersion and absorption, with the three-tetrahedron array gaining one quantum of energy in the transformation to the octahedron, which has volume for four (3+1) tetrahedra. Likewise, the octahedron loses one quantum in the transformation from a volume of four to the volume of three tetrahedra.
Note that the transformation involves the 90° rotation of one of the struts. Fuller would identify this as an example of “precession” about which he had much to say. It occurred to him that whenever energy is gained, lost, or otherwise transformed by a system, precession is always involved, and is geometrically manifested in effects at 90° to the perceived action.
The transformation between the helical and radial close packing of spheres is represented in the vector model by the 90° rotation of one of its vectors.
The transformation between the radial and the lateral can be described as the transformation that occurs when the nuclear sphere is removed from the VE configuration. The twelve remaining spheres then rearrange themselves into an icosahedron.
Twelve unit spheres close pack radially around a nucleus as the vector equilibrium. When the nuclear sphere is removed, the twelve spheres rearrange themselves into the discrete shell of the icosahedron.
The VE twists to the right or to the left to form a positive or a negative icosahedron. Note that this effect, too, is precessional, i.e., the gain and loss of energy is accompanied by a circumferential effect that is at 90° to the radial disappearance of the nucleus. In the vector model, the loss of the nucleus is presented as the disappearance of six of the VE’s twelve radial vectors. Six vectors equals one tetrahedron, or one quantum of energy. The remaining six radial vectors are added to the 24 edge vectors of the VE to compose the 30-edge, structurally stable icosahedron.
Vector model of the transformation of radial to lateral close-packing of spheres by the removal of the nucleus. The VE and its twelve radial vectors (left); The VE with six of its twelve radial vectors removed (center); The six radial vectors are added to its VE’s 24 edge vectors to form the icosahedron (right).
It’s important to remember, however, that the energy is only displaced, not destroyed. When the transformation is reversed, the six radial vectors are reintegrated, not created. This is more clearly demonstrated in the jitterbugging of the isotropic vector matrix, of which this transformation is an isolated part.
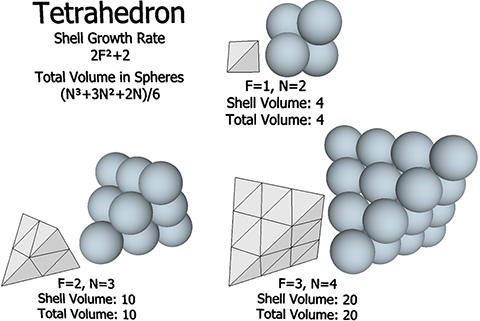
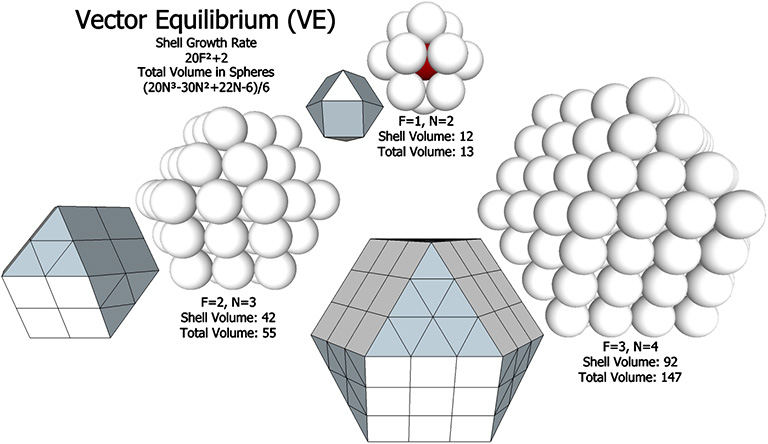
The isotropic vector matrix produces close packed arrays not only of vector equilibria, but also of tetrahedra, octahedra, cubes, rhombic dodecahedra, as well as other polyhedra. However, only the VE construction has uniform and uninterrupted shell growth around a single nuclear sphere. Other polyhedra cluster around the nucleus in either every other layer, as is the case with spheres close-packed as octahedra, or in every fourth layer, as is the case with spheres close packed as tetrahedra or cubes.
Equations for the Close Packing of Spheres
For the shell growth rate in spheres, F is the number of subdivisions along any one edge. That is, you count the spaces between the spheres rather than the spheres themselves. For total sphere volume, N is the number of spheres along any one edge. That is N = F+1.
Shell Growth Rates
The shell growth rate formulas all follow the same pattern, nF²+2.
* Spheres close-packed as cubes in the 60° grid of the isotropic vector matrix will have a shell volume of 3F²+2 in even-numbered layers only. Odd-numbered layers produce cubes with four truncated corners, and its formula is 3F²+1. ** Spheres stacked as cubes on the 90° grid will have a shell volume of 6F²+2, but the configuration is unstable. *** Spheres stacked as rhombic dodecahedra on a rhomboid grid will have a shell volume of 12F²+2, but the configuration is unstable. Spheres close-packed as rhombic dodecahedra in the the isotropic vector matrix are defined by close-packed nuclear domains rather than the spheres themselves. See Formation and Distribution of Nuclei in Radial Close-Packing of Spheres.
“The vector equilibrium’s jitterbugging conceptually manifests that any action (and its inherent reaction force) applied to any system always articulates a complex of vector-equilibria, macro-micro jitterbugging, involving all the vector equilibria’s ever cosmically replete complementations by their always co-occurring internal and external octahedra, all of which respond to the action by intertransforming in concert from “space nothingnesses” into closest-packed spherical “somethings,” and vice versa, in a complex threeway shuttle while propagating a total omniradiant wave pulsation operating in unique frequencies that in no-wise interfere with the always omni-co-occurring cosmic gamut of otherly frequenced cosmic vector-equilibria accommodations.“ —R. Buckminster Fuller, Synergetics, 464.06
The Jitterbug is what Fuller called a transformation that occurs when the radial vectors are removed from the otherwise stable configuration of the vector equilibrium (VE).
The vector model of the jitterbug. Removal of the radial vectors from the VE precipitates its collapse into an octahedron.
The whole isotropic vector matrix can be made to jitterbug, with VEs transforming into octahedra, and octahedra into VEs. This coordinated transformation of the isotropic vector matrix suggests a model for omnidirectional wave propagation.
The coordinated jitterbugging of the isotropic vector matrix suggests a model of omnidirectional wave propagation.
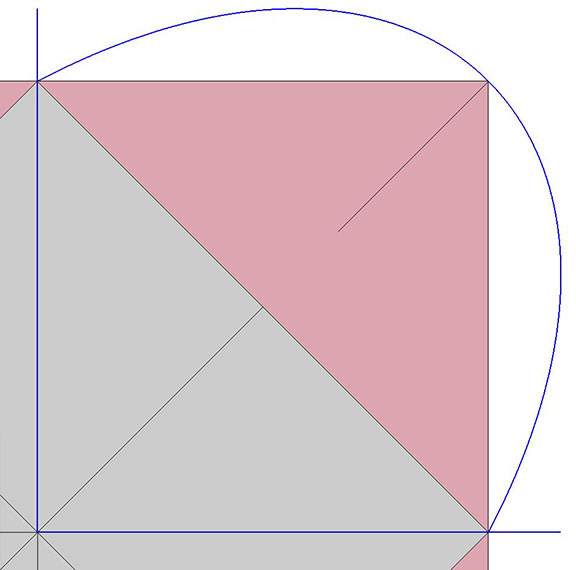
The Jitterbug transformation can be reduced to the rotation of a single triangle inside a cube. If the rotation is constant around the vector described by the cubic diagonal, and the triangle’s vertices are constrained to follow the orthogonal planes defined by the cube as it would in the context of the VE, the triangle will accelerate along the rotation axis. Consequently, the jitterbug seems to “bounce” between phases.
The jitterbug transformation reduced to a single triangle rotating within a cube. The distance traveled along the axis is proportional to the square of the rotation. Consequently, the triangle seems to “bounce.”
It’s important to note that the oscillations of the jitterbug do not follow a sinusoidal curve, nor do they follow the equations for simple harmonic motion. The formula that almost (see below) seems to work is:
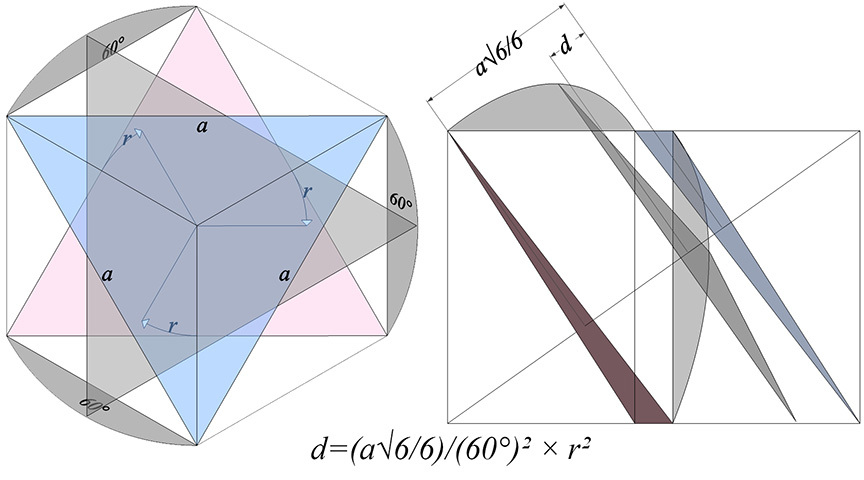
Formula for the jitterbug: d = (√6/6) × a/(60°)² × (r°)²
where a is the edge length of the triangle, and d is the distance traveled along the rotation axis after a rotation of r°.
Formula for the jitterbug that equates its radial expansion and contraction (d) with the square of the rotation (r) of the triangles about their radial axis.
This parallels the formula for falling objects in a gravitational field:
Formula for a falling object: d=(1/2)×g×t²
We see that (a√6/6)/(60°)² in the jitterbug formula substitutes for the acceleration due to gravity (g) in the formula for falling bodies, and that rotation (r degrees) substitutes for time (t seconds).
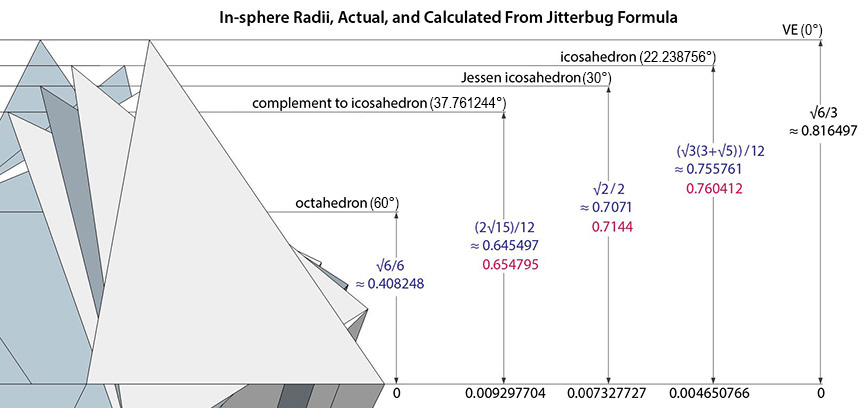
The formula, though adequate for purposes of my illustrations and animations, is not perfect. The in-sphere radii the formula predicts differ from the actual values by as much as 1.4%. For example, the in-sphere radius of the icosahedron (of unit edge-length) is φ²√3/6 ≈ 0.755761, while the formula calculates a value of approximately 0.760412, a difference of about 0.00465. The in-sphere radii of the Jessen icosahedron, and the space-filling complement to the regular icosahedron are √2/2 ≈ 0.7071 and 2√15/12 ≈ 0.645497, respectively. The formula calculates values of 0.7144 and 0.654795, a difference of about 0.00733 and 0.00930 respectively.
The actual values (in blue) of the in-sphere radii at different stages of the jitterbug differ by as much as a full percentage point from the values (in red) calculated with the formula. Angular rotations of the jitterbugging faces are shown at the top, and differences between actual and calculated values of the in-sphere radius at each stage are shown at the bottom.
The arc described by the triangle’s vertices follow what appears to be a hyperbolic path. Fuller assumed the path should be a geodesic arc describing a spherical cube. I find the actual hyperbolic shape more intriguing, however, as it suggests a four-dimensional geodesic, e.g., the swing-by trajectory of an object passing through a gravitational field.
The hyperbolic path followed by the vertices of the rotating triangle in the jitterbug.
Approximately midway between the vector-equilibrium and octahedron phases, the jitterbug describes the regular icosahedron. The collapsing VEs and expanding octahedra, however, do not simultaneously describe the regular icosahedron. The common shape, precisely midway between the transformation from one to the other, is actually the shape of the six-strut tensegrity sphere. Fuller neglected to give the shape a name, perhaps failing to appreciate its full significance. Other mathematicians, namely Borge Jessen, have taken credit for its “discovery,” and Wikipedia affirms its identity as the Jessen Orthogonal Icosahedron.
Precisely midway between the base phases of the jitterbug, both the collapsing VEs and expanding octahedra simultaneously describe the shape of the six-strut tensegrity sphere, or “Jessen Orthogonal Icosahedron.”
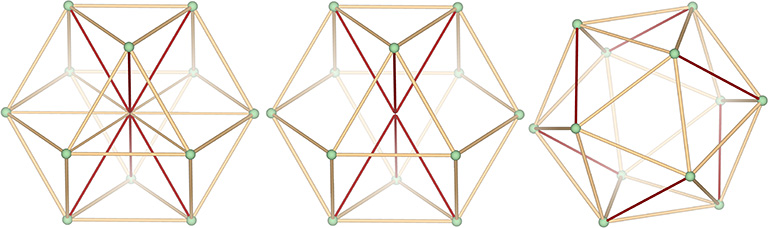
In the figure below, the Jessen orthogonal icosahedron is on the far right. The others are variations of the tensegrity model, all of which match its shape exactly.
The Jessen Orthogonal Icosahedron (far right) is best understood as the natural equilibrium state of the six-strut tensegrity, here modeled from left to right as: 1) three groups of two parallel struts each supporting the others by rubber-band slings; 2) as elastic triangular loops held by rings sliding frictionlessly on a cubical scaffold; and 3) the conventional model of the six-strut tensegrity sphere constructed as a continuous tension web.
Any two parallel struts of the six-strut tensegrity sphere can be alternately pulled outward and pushed inward to recapitulate the jitterbug of the vector model.
Any one of the three pairs of struts in the six-strut tensegrity sphere may be alternately pulled apart and pushed together to recapitulate the jitterbug.
If we allow the edges of the triangles to shorten and lengthen as they do with the expansion and contraction of the 6-strut tensegrity sphere, the jitterbug should oscillate like a pendulum or guitar string, rather than a bouncing ball.
The VE may be conceived as eight regular tetrahedra sharing a common vertex, and the jitterbug as the oscillation between positive and negative tetrahedra. See The Dual Nature of the Tetrahedron.
the jitterbug may be conceived as positive-negative oscillations of the eight tetrahedra comprising the VE.
The operation is made more explicit, I think, in another tensegrity model of the jitterbug which focuses on the eight tetrahedra rather than the VE. The six-strut tensegrity sphere can be transformed, through coordinated clockwise or counter-clockwise rotations of the struts, into either a positive or negative tetrahedron.
The eight tetrahedron of the VE replaced with eight six-strut tensegrities which oscillate between positive and negative tetrahedra.
The two tensegrity models of the jitterbug can be placed one inside the other with surprisingly little or no interference. This may be the truest model of the jitterbug transformation as the natural state of the isotropic vector matrix. In the vector model, the transformation is instigated by the removal of the twelve radial vectors from the VE, whereas in this and the following models, its only trigger is the spontaneous reversal of the tetrahedra; no quanta are lost or created in the process.
Combining the two tensegrity models of the jitterbug results in what may be the truest model of the jitterbug transformation
For more information on transformational operations of the six-strut tensegrity sphere, as well as the twelve- and thirty-strut tensegrity spheres, see Tensegrity.
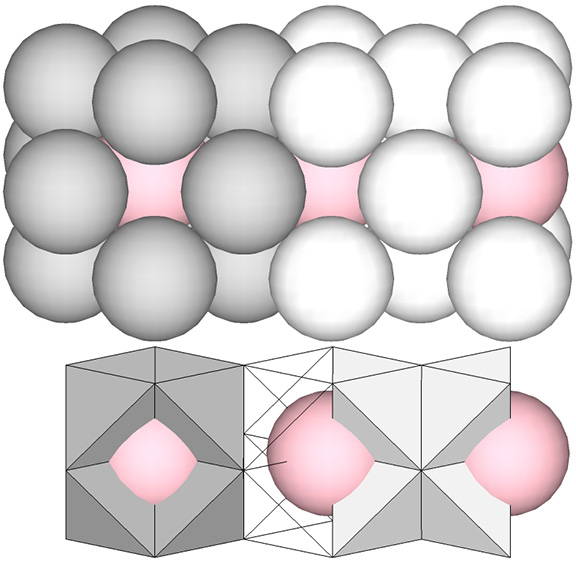
In the interstices model (See Spaces and Spheres, and Spaces and Spheres (Redux)), the eight tetrahedra occupy the interstices (concave octahedra) between close-packed spheres. The VE phase defines the nuclear domain, and the octahedron phase defines the space (a concave VE) left by the removal, transformation, or collapse, of the nucleus. This model emphasizes the space-to-sphere, sphere-to-space oscillations of jitterbug. Note that the interstices, i.e., the eight tetrahedra defining the the concave octahedra, are the only constant in the jitterbug; the spheres and spaces (VEs and octahedra) emerge as a consequence of the positive-negative oscillations of the tetrahedra.
The interstices model of the jitterbug emphasizes its space-to-sphere, sphere-to-space oscillations.
The quanta model of the jitterbug presents the sphere-to-space, space-to-sphere transformations of the jitterbug as the oscillation between the two quanta module constructions of the rhombic dodecahedron.
When modeled with spheres, the isotropic vector matrix divides naturally into cubic and VE modules. The cubic modules consist of 14 spheres, one more than VE’s 13, i.e., 12 spheres around a central nuclear sphere.
The isotropic vector matrix, when modeled as spheres, divides naturally into discrete cubes and VEs. Cubes are shown as white spheres (top) and white tetrahedra (bottom), and VEs are shown as gray spheres (top) and gray tetrahedra (bottom).
This suggests a model for the jitterbug in which the nuclei migrate between cubes and the VEs.
Modelling the Jitterbug with cubes and VEs suggests the migration of nuclei between the two.
In Fuller’s energetic geometry, the great circles of the VE and icosahedron model energy transference and containment. He described them as “railroad tracks” which either move energy from one domain to another, or divert energy into into loops or holding patterns. (See: Great Circles: The 31 Great Circles of the Icosahedron, and; Great Circles: The 25 Great Circles of the Vector Equilibrium (VE).) What interested Fuller in his bow-tie models was their resolution of this idea with the apparent contradiction of two vectors passing through the same point simultaneously. As bow-ties, the great circle energy loops would simply deflect off one another at the vertices, keeping to their own holding patterns without the need to cross paths. All seven of the great circle sets of the VE and the Icosahedron are recapitulated in the bow-tie models described here and in Great Circle Bow-Ties of the VE. Both, I think, serve as quiet validation of Fuller’s intuitions.
The exterior angles of the Basic Disequilibrium LCD triangle is defined by the 15 great circles of the icosahedron, i.e., the geodesics described by its 15 edge-to-edge axes of spin. As with most (perhaps all) spherical polyhedra derived from great circles, its faces (the 120 LCD triangles) can be constructed from bow tie shapes folded from those great circles along fold lines laid out by their central angles. The central angles of the LCD triangle are: atan(1/φ) ≈ 31.717474°; atan(1/φ²) ≈ 20.905157°, and atan(φ) – atan(1/φ²) ≈ 37.377368°, where φ = the golden ratio, (√5+1)/2. These are laid out on each of the 15 great circle disks as shown in the illustration.
The 15 great circles of the icosahedron can be constructed from 15 great circle disks folded into 4-tetrahedra bow-ties along the central angles of Basic Disequilibrium LCD Triangle. The bow ties are hinged as shown and may be reconfigured as necessary to complete the 15 great circles.
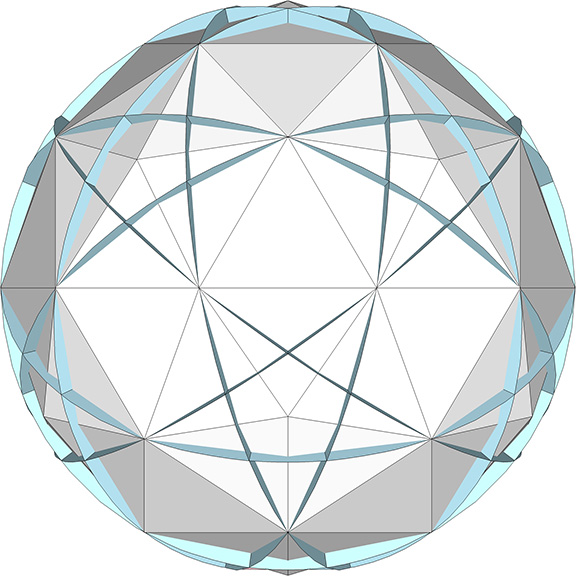
The 10 great circles of the icosahedron are the geodesics described by the regular icosahedron’s 10 face-to-face axes of spin. They describe the spherical vector equilibrium VE as well as a spherical polyhedron that aligns with the 2F Class 1 geodesic icosahedron. (See: Geodesics.)
The 10 great circles of the icosahedron, highlighted in blue, describe 5-pointed stars, pentagons, and irregular hexagons that align with the 2F Class 1 geodesic icosahedron.
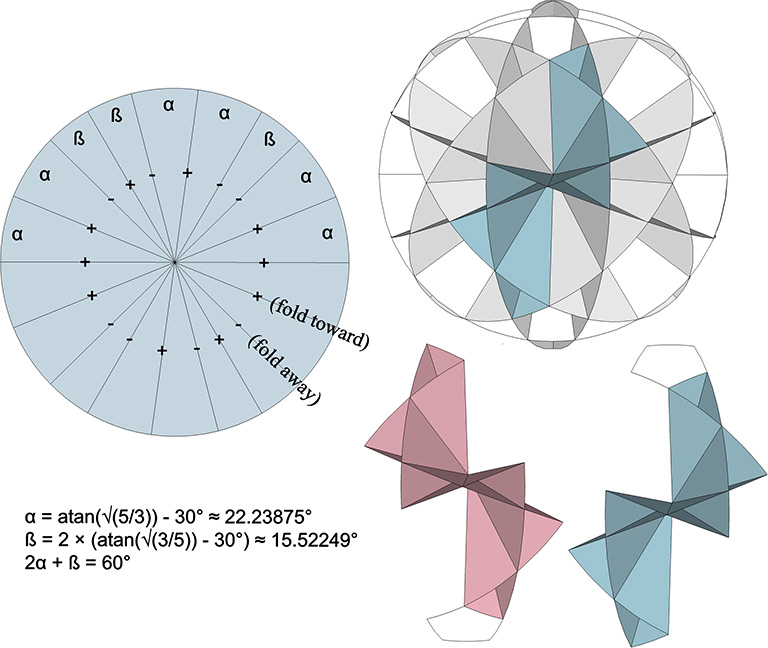
The 10 great circles of the icosahedron describe 60 identical triangles on the surface of the sphere. The central angles are: atan(√(5/3)) – 30° ≈ 22.23875°; 2×atan(√(3/5)) – 30° ≈ 15.52249°. Note that the two angles add to precisely 60°. The central angles are laid out on each of the ten great great circle disks, which are then folded to produce 10 chains (5 positive and 5 negative) each consisting of six identical edge-bonded tetrahedra. When properly arranged, the tetrahedra define between them the additional twelve pentagons and twenty hexagons in the pattern illustrated.
The 10 great circles of the icosahedron may be constructed from 10 great circle disks folded into 6-tetrahedron bow-ties (5 positive and 5 negative) as shown.
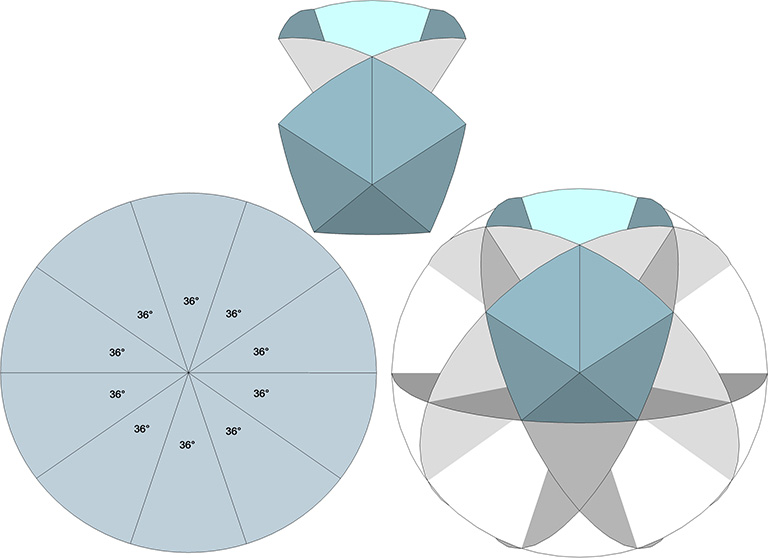
The 6 great circles of the icosahedron are the geodesics described by the regular icosahedron’s 6 vertex-to-vertex axes of spin. They describe the spherical icosidodecahedron with its twelve identical pentagons and twenty triangles. The icosidodecahedon is the vertex-truncated regular icosahedron, and is also the shape of the 30-strut spherical tensegrity that reduces to the icosahedron (see Tensegrity). The central angles, all 36°, and are laid out on each of the six great great circle disks, which are then folded to produce six pentagonal bow ties. When properly arranged, the pentagons define between them the additional twenty triangles in the pattern illustrated.
The 6 great circles of the icosahedron may be constructed from 6 great circle disks folded into pentagonal bow-ties as shown.
In Fuller’s energetic geometry, the great circles of the VE and icosahedron model energy transference and containment. Fuller described them as “railroad tracks” which either move energy from one domain to another, or divert energy into into loops or holding patterns. (See: Great Circles: The 31 Great Circles of the Icosahedron, and; Great Circles: The 25 Great Circles of the Vector Equilibrium (VE).) What interested Fuller in his bow-tie models was their resolution of this idea with the apparent contradiction of no two vectors able to pass through the same point simultaneously. As bow-ties, the great circle energy loops would simply deflect off one another at the vertices, keeping to their own holding patterns without the need to cross paths. All seven of the great circle sets of the VE and the Icosahedron are recapitulated in the bow-tie models described here and in Great Circle Bow-Ties of the Icosahedron. Both, I think, serve as quiet validation of Fuller’s intuitions.
If the paper strips unfolded from a polyhedron suggest wave propagation, or the conversion of mass to energy, the alternative construction of folding paper disks into great-circle bow ties perhaps suggests the inverse, the conversion of energy to mass, a beautiful model for the wave-particle duality of energy.
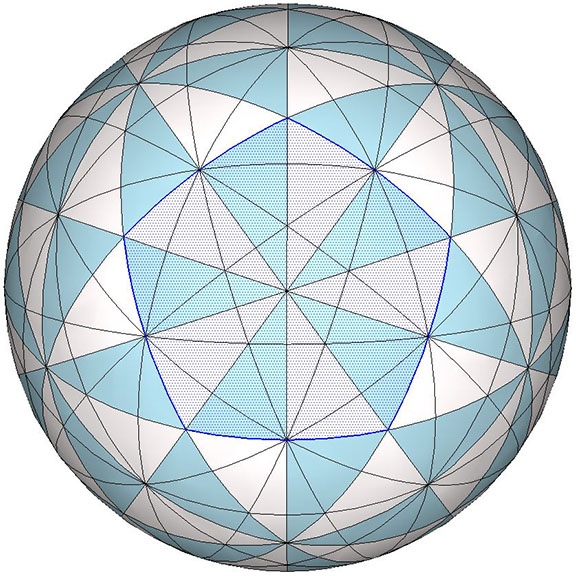
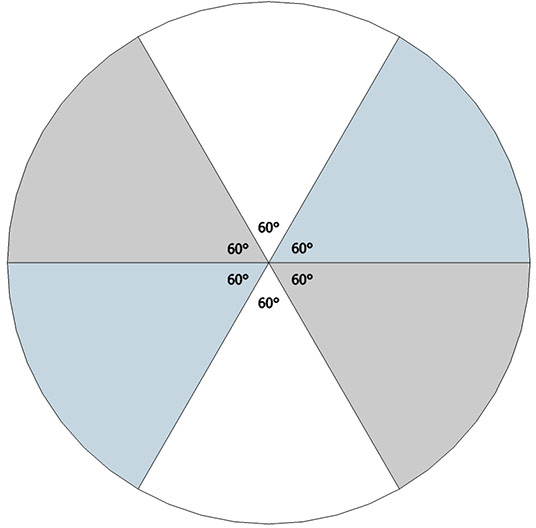
The spherical Vector Equilibrium (VE) is disclosed by the set of 4 great circles described by the 4 axes of spin through the VE’s eight triangular faces. The spherical VE can also be constructed from the folding of the four disks described by these same great circles. These four disks cross each other at 60°, the central angle of each of the VE’s 24 edges.
The 4 axes through the VE’s eight triangular faces define the great circles that disclose the spherical VE. The 4 intersecting disks of these great circles meet at 60°, the central angle of each of the VE’s 24 edges.
The disks may be folded along these central angles to form bow-ties and recombined into the same configuration as that formed by the four flat disks. For the bow tie construction of the VE, inscribe its central angles onto four disks as shown, with three fold lines crossing the center at 60°.
One of the four great circle disks inscribed with the fold lines for constructing the four great circle bow-ties.
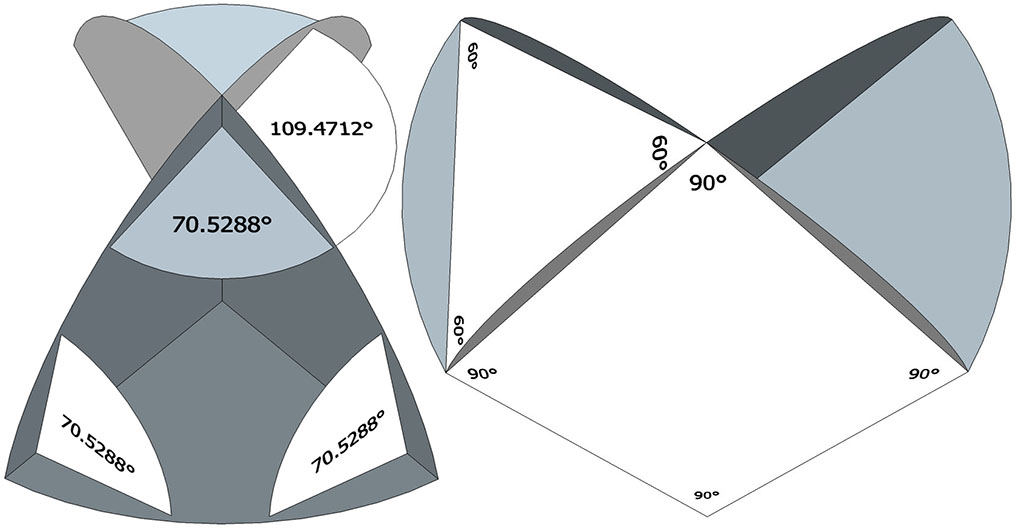
The bow tie’s fold lines are the radii of the VE, and the resulting construction discloses the spherical and planar angles shown below.
The bow-tie construction of the four great circles of the VE.
The VE is constructed from four bow ties. It is no coincidence that the four disks have the same surface area as the sphere they describe, i.e.. four times the area of a great circle. But just as each disk has two surfaces (front and back), a sphere has two surfaces, one convex (the outside) and one concave (the inside). Both are beautifully represented in the bow tie construction of the spherical VE.
In the illustration below, one side of the four disks is exposed in the inside surfaces (colored pink) of the the VE’s eight tetrahedra. The other side (colored blue) is exposed in the inside surfaces of the VE’s six half-octahedra.
The four bow-ties folded from the four great circles of the VE combine to form the spherical VE.
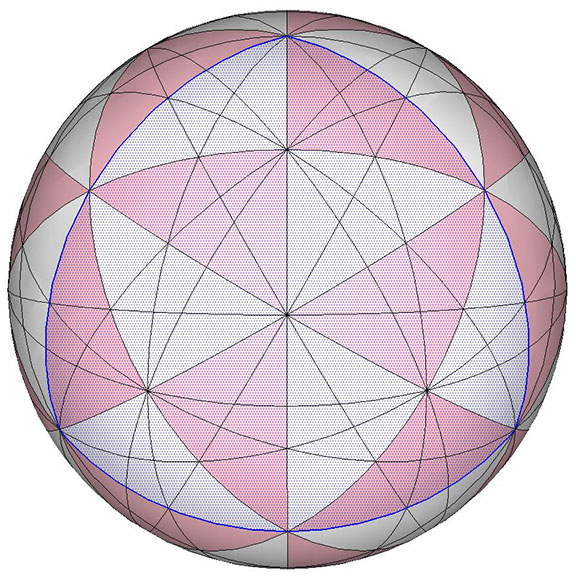
The six great circles of the VE, those described by hemispherical rotations about its vertex to-opposite-vertex axes, disclose the spherical rhombic dodecahedron, as well as the spherical cube, and the positive and negative spherical tetrahedron.
The 6 vertex-to-vertex axes define the six great circles that disclose the spherical rhombic dodecahedron, cube, and tetrahedron. Their six intersecting disks meet at the central angles of the rhombic dodecahedron edges and short diagonal.
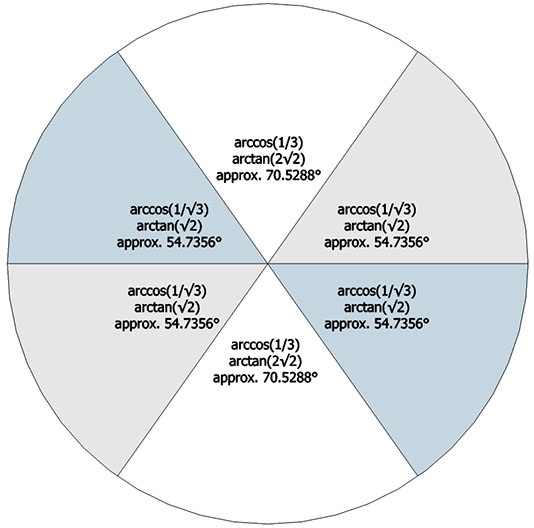
For the bow tie construction of the rhombic dodecahedron, inscribe its central angles onto six disks as shown, with fold lines crossing at arctan(√2) ≈ 54.7356°, and arctan(2√2) ≈ 70.5288°.
One of the six great circle disks inscribed with the fold lines for constructing the six great circle bow-ties.
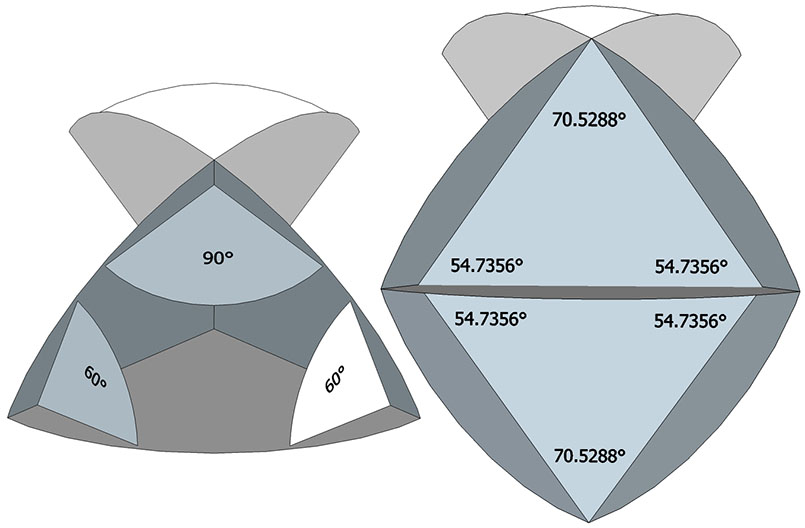
The bow tie’s fold lines are the radii of the rhombic dodecahedron, and the resulting construction discloses the spherical angles and planar angles shown below.
The bow-tie construction of the six great circles of the VE.
The rhombic dodecahedron is constructed from six bow ties.
The six bow-ties folded from the six great circles of the VE combine to form the spherical rhombic dodecahedron, cube, and tetrahedron.
We can remove the extra arc along the short diagonal of each rhomboid face to further clarify the rhombic dedecahedron. Coincidentally these extra arcs are those which disclose the spherical cube.
The six great circle bow-ties describe a rhombic dodecahedron with an extra arc along its short diagonal which describes the spherical cube.
The bow tie construction of the rhombic dodecahedron with extra arcs removed is the equivalent of two spherical tetrahedra, the same two tetrahedra, one positive and one negative, disclosed by the diagonals of the spherical cube.
The spherical rhombic dodechedron also describes the positive and negative spherical tetrahedron.
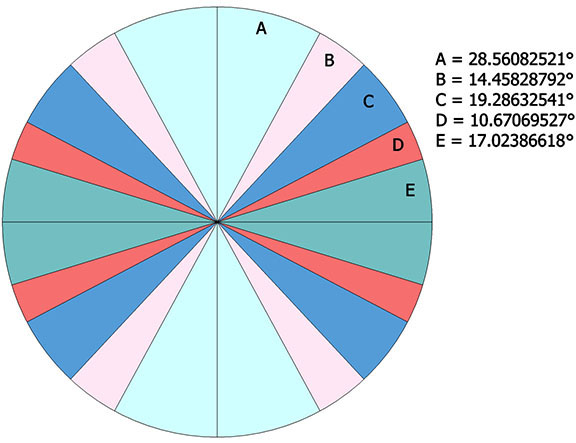
The 12 great circles of the VE, those described by hemispherical rotations about its edge-to-opposite-edge axes, is constructed from great circle disks as follows. The first step is to identify all of the unique surface arcs and calculate their central angles. The central angles are laid out on the circle so that edges which share a common vertex are either adjacent to one another, or can be made so by folding. Each of the four right-angle quadrants is scribed with fold lines at the the following angles in alternating sequences: A ≈ 28.56082521°; B ≈ 14.45828792°; C ≈ 19.28632541°; D ≈ 10.67069527°, and; E ≈ 17.02386618°.
Great circle disk inscribed with fold lines for the twelve great circle bow ties of the VE.
The folding of each of the twelve great-circle disks is rather complex.
The twelve great circle disks fold into a complex bow-tie.
The assembly is achieved by 90° rotations about the centers of six octagons arranged, conveniently, on perpendicular axes.
The twelve great circle bow-ties combine to form a complex spherical polyhedron.
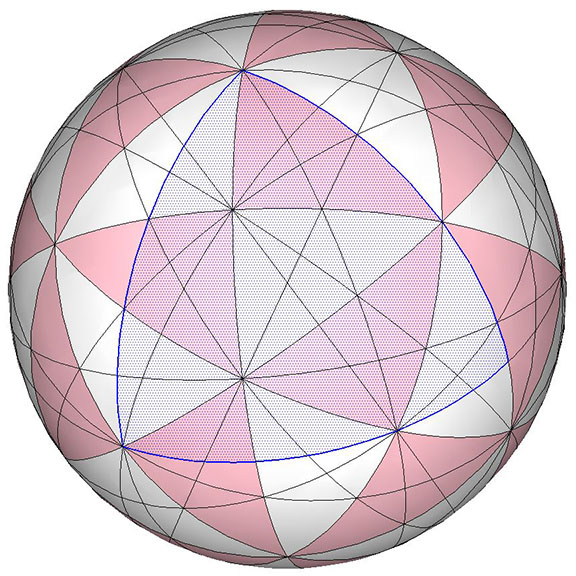
So far we’ve covered the bow tie constructions of the common polyhedra derived from the folding of the 4, 6, and 12 great circles of the VE, the axes of spin through the eight triangular faces, the twelve vertices, and the twenty-four edges. One axis of spin remains, the three running through the VE’s square faces and which defines the spherical octahedron. The three axes are perpendicular to one another and the central angles are therefore all 90°.
The recapitulation of the octahedron though the folding of its 3 great circle disks is not possible. The bow tie construction of the octahedron requires 6 great circle disks, the same number used in the the rhombic dodecahedron. These are folded into two half-circles which are folded again into quarters at 90° to form an L shape. Each edge of the final octahedron is therefore doubled. Note that this doubling is also present in the vector model of the jitterbug when the 24 edges of the VE contract to the 12 edges of the octahedron.
The bow-tie construction of the 3 great circles requires 6 great circle disks which are folded in half and then folded again into quarters.
The folded units are then arranged around a common center to form the complete octahedron.
Six great circle disk folded into quarter spheres combine to form the spherical octahedron.
Note that only one face from each of the six disks is displayed. The other is hidden inside the folds. In the vector model of the isotropic vector matrix, the octahedron defines the space between spheres. A space has contact with only the convex surfaces of its adjacent spheres and has no concavity of its own. The exposure of just one face of its great circle disks therefore makes sense for the octahedron.
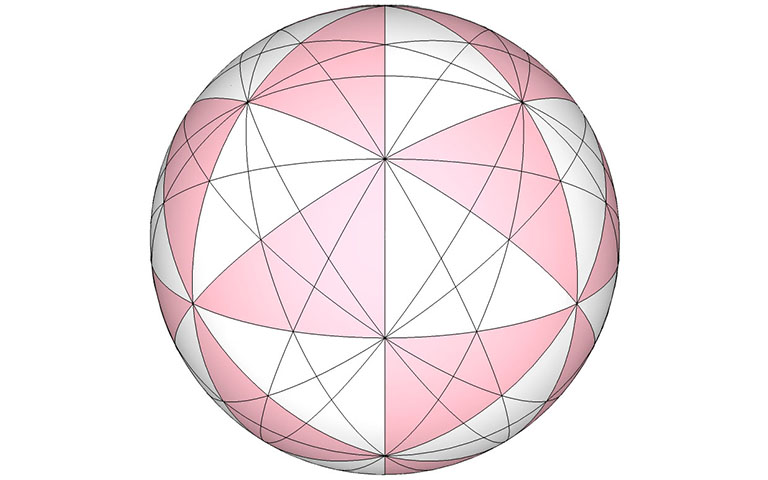
“The system of 25 great circles of the vector equilibrium defines its own lowest common multiple spherical triangle, whose surface is exactly 1/48th of the entire sphere’s surface. Within each of these 1/48th-sphere triangles and their boundary arcs are contained and repeated each time all of the unique interpatterning relationships of the 25 great circles.” — R. Buckminster Fuller, Synergetics, 453.01
The Basic Equilibrium LCD Triangle subdivides the surface of the sphere into 48 equal parts and is derived from the 25 great circles of the vector equilibrium. It is one of three spherical triangles on which all geodesic dome calculations are based. The other two are: the basic disequilibrium LCD triangle which subdivides the sphere into 120 equal parts and is derived from the 31 great circles of the icosahedron, and; the 1/24th triangular subdivision of the spherical tetrahedron.
Surface of sphere showing the 48 Basic Equilibrium LCD Triangles (24 positive and 24 negative) inscribed with the 25 great circles of the 12, 6, 4, and 3 axes of spin of the vector equilibrium (VE).